分析力学与拉格朗日方程
从牛顿力学出发处理复杂系统时,常常需要求解大量约束力。以一根细绳悬挂的单摆为例,绳子的张力虽然始终存在,却对摆的运动轨迹毫无贡献——我们真正关心的只有摆角随时间的变化。分析力学正是从这一角度出发:抛开约束力,选取最自然的独立变量来描述系统状态,将运动方程的推导变成一套统一的算法。拉格朗日方程是这套算法的核心,它适用于从单摆到多体系统、从平面运动到三维转动的各类力学问题。
广义坐标与自由度
描述一个力学系统的状态,需要给出系统中各质点的位置。然而,对于有约束的系统,各质点的坐标之间存在约束方程,真正独立的变量数往往远少于所有坐标的总数。
系统真正独立的运动自由数称为自由度,记为 s。对于包含 N 个质点、受到 k 个完整约束的系统:
s=3N−k
用来完整描述系统构型的 s 个独立变量 q1,q2,…,qs 就称为广义坐标。广义坐标不必是直角坐标,可以是角度、面积、比值等任何能区分不同构型的量,只要满足独立性和完备性即可。
质量为 m、摆长为 l 的单摆,约束为 x2+y2=l2(摆长固定)。系统自由度 ,选取摆角 作为唯一广义坐标。质点位置由 完全确定:
x=lsinθ,y=−lcosθ
这样,原本需要两个坐标描述的问题简化为一个广义坐标的问题,约束力(绳的张力)也自动从方程中消失。
拉格朗日函数
用广义坐标描述系统后,引入一个关键量——拉格朗日函数(简称拉氏量),定义为系统动能与势能之差:
L=T−V
其中 T 是系统的总动能,V 是系统的总势能,L 是广义坐标 qi、广义速度 q˙ 和时间 的函数:。
拉格朗日函数 L=T−V 本身没有直接的物理“含义”,它是一个构造出来的数学工具。真正重要的是:由 L 出发,通过拉格朗日方程可以自动给出正确的运动方程,而无需显式处理约束力。
以摆角 θ 为广义坐标,取悬挂点为势能零点(向下为负)。质点位置为 (lsinθ,−lcosθ),速度大小为 lθ˙,因此:
T=21m(lθ˙)2=
V=−mglcosθ
L=T−V=21ml2θ
注意势能中取负号,是因为以悬挂点为零点时,质点位于 y=−lcosθ 处,重力势能为 V=mg(−lcosθ)=−mglcosθ(取向上为正)。
哈密顿原理
分析力学的理论基础是哈密顿原理(也称最小作用量原理)。它不从力出发,而是从一个积分量——作用量出发,给出系统运动规律的变分表述。
定义从时刻 t1 到 t2 的作用量为:
S=∫t1t2Ldt
哈密顿原理陈述如下:在所有满足边界条件(即两端固定 qi(t1) 和 qi(t)的可能路径中,真实运动的路径使作用量 取驻值(通常为极小值),即:
δS=δ∫t1t2L
这里 δ 表示变分——对路径做微小扰动,但两端固定。哈密顿原理将运动规律从“力的方程”提升为“对全局路径的整体描述”,是分析力学最深刻的出发点。
哈密顿原理本质上说的是:自然界中的运动总是沿着“作用量取极值”的路径进行。这一思想与光学中的费马原理(光沿光程最短路径传播)有深刻的类比,体现了自然定律的极值性质。
拉格朗日方程的推导
从哈密顿原理出发,通过变分运算可以推导出拉格朗日方程。对作用量做变分,将 δS=0 展开,利用分部积分和边界条件(两端固定,δqi(t1)=δq),最终得到对每个广义坐标 成立的方程:
dtd∂q˙
这就是拉格朗日方程,也称欧拉-拉格朗日方程。对于有 s 个自由度的系统,共有 s 个这样的方程,恰好对应 s 个广义坐标。
拉格朗日方程的使用步骤:第一步写出系统的动能 T 和势能 V,构造 L=T−V;第二步对每个广义坐标 q 分别计算 和 ;第三步代入方程 ,即可得到运动方程。
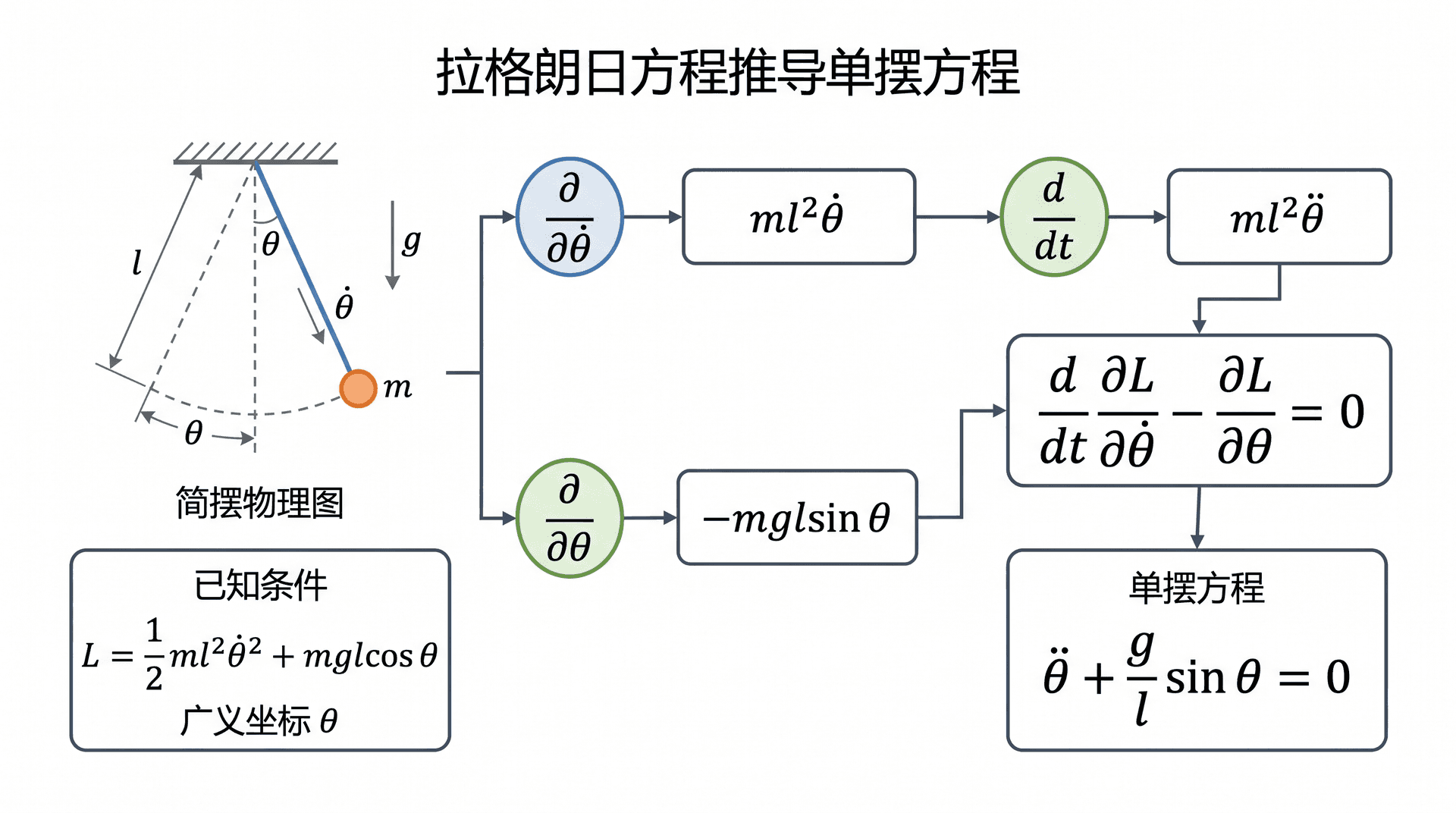
由例二已知 L=21ml2θ˙2+,广义坐标为 。
计算各偏导数:
∂θ˙∂L=ml
∂θ∂L=−mglsinθ
代入拉格朗日方程:
ml2θ¨−(−mglsinθ)=0⟹
与上一部分内容用达朗贝尔原理得到的结果完全一致,但推导过程更加系统,约束力(绳的张力)始终未出现。
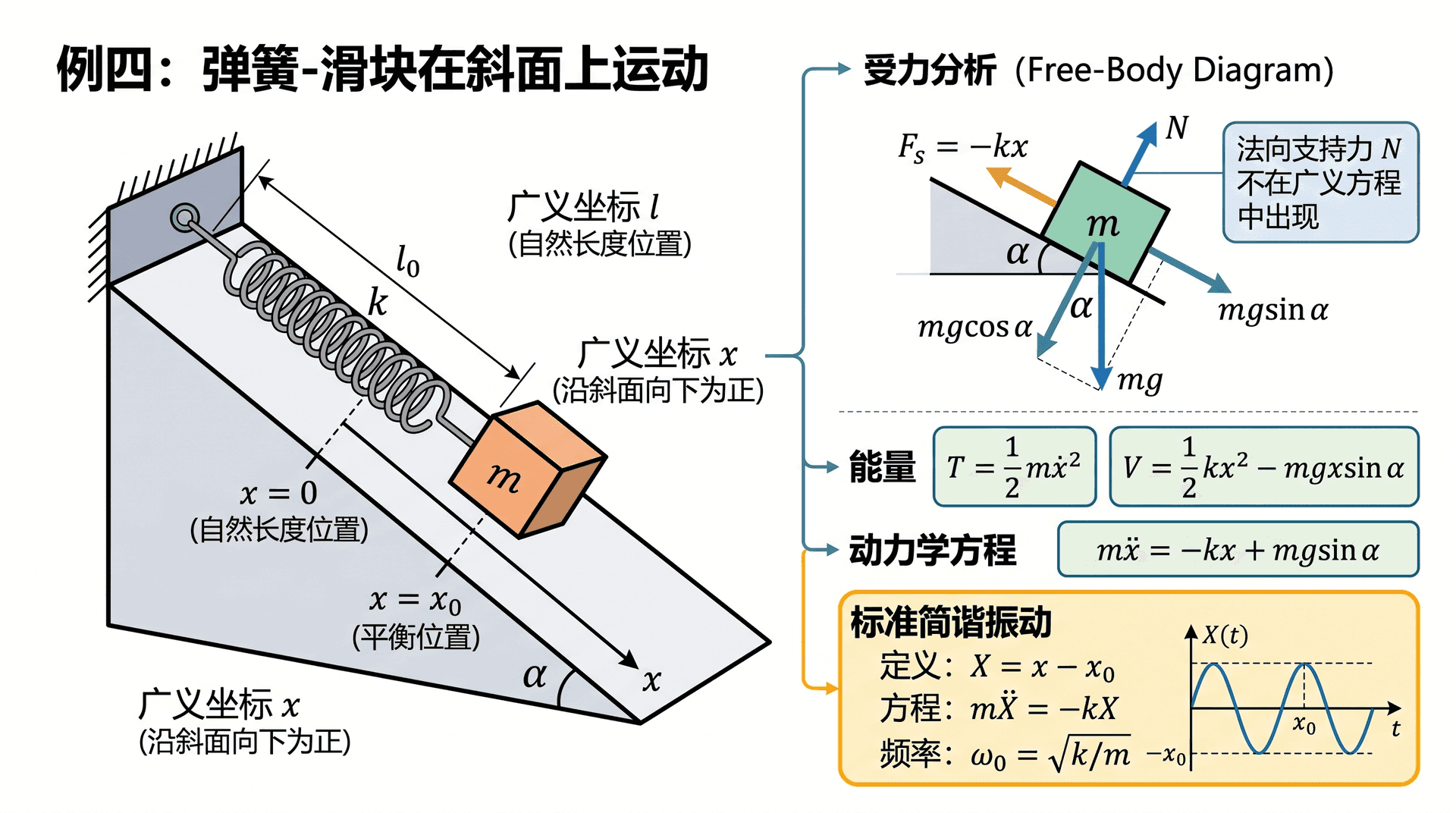
质量为 m 的滑块沿倾角为 α 的光滑斜面运动,通过劲度系数为 k 的弹簧连接在斜面上方的固定点,弹簧自然长度为 l0。取滑块沿斜面的位移 x(从弹簧自然长度位置量起,沿斜面向下为正)为广义坐标。
动能:T=21mx˙2
势能包括弹性势能和重力势能:
V=21kx2−mgxsinα
拉格朗日函数:
L=21mx˙2−
代入拉格朗日方程:
mx¨=−kx+mgsinα
令 x0=mgsinα/k(平衡位置偏移量),令 X=x−x0,方程化为标准简谐振动形式:
mX¨=−kX,ω0=m
斜面的约束力(法向力)完全没有出现,方程自然给出了绕平衡位置的简谐振动。
守恒定理与循环坐标
拉格朗日方程将守恒定律与坐标的对称性紧密联系起来,这是分析力学最优美的特征之一。
循环坐标(可遗忘坐标):若拉格朗日函数对某个广义坐标 qj 不显含(即 ∂L/∂qj=0),则称 q 为循环坐标。由拉格朗日方程:
dtd∂q˙
对应的广义动量 pj 守恒。三种最常见的守恒定律对应关系如下:
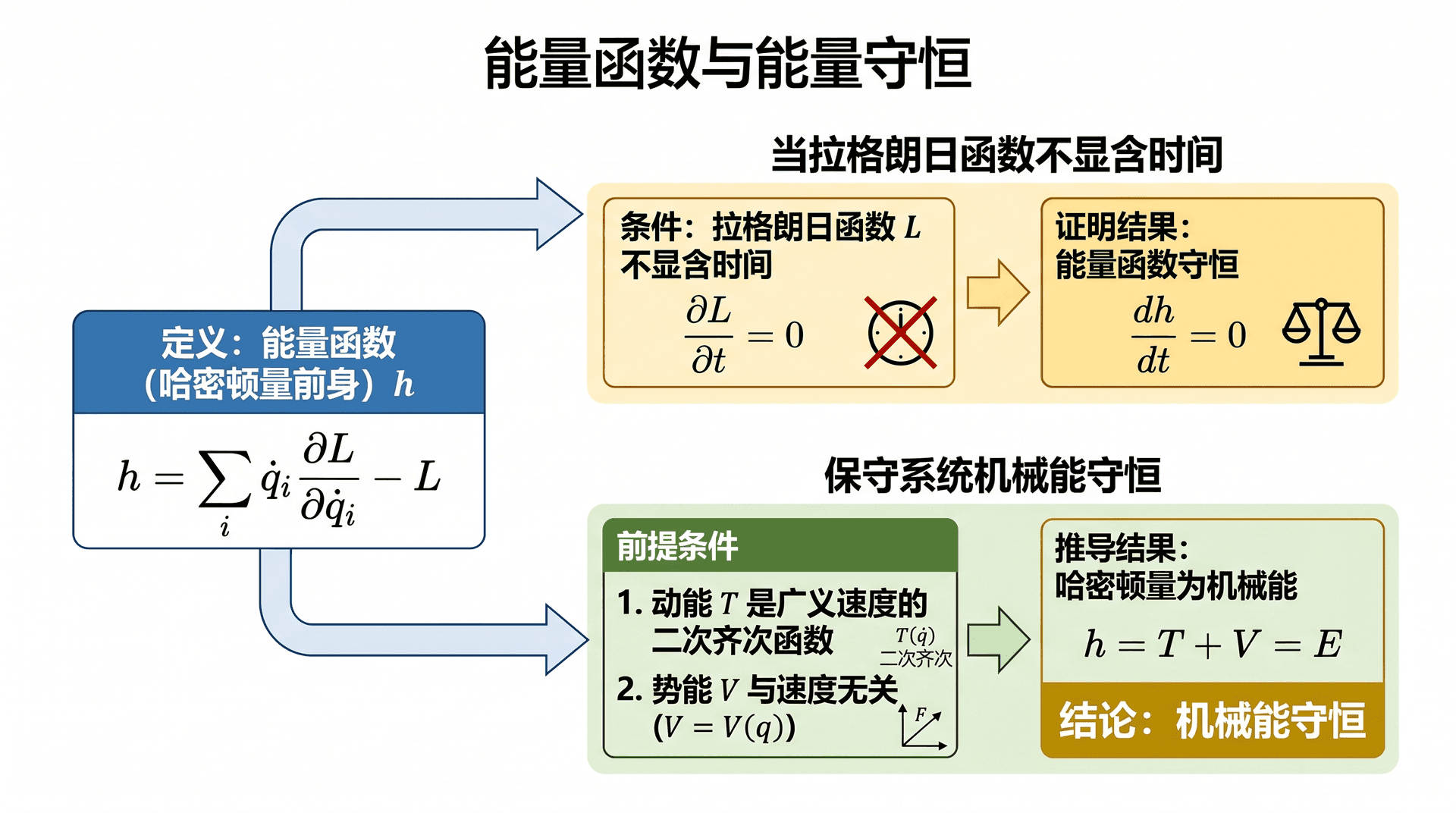
能量函数与能量守恒:定义能量函数(哈密顿量的前身)为:
h=i∑q˙i
当拉格朗日函数不显含时间(∂L/∂t=0),可以证明 dh/dt=0,即 h 守恒。对于保守系统(动能是广义速度的二次齐次函数,势能与速度无关),h=T,即机械能守恒。
质量为 m 的粒子在平面内自由运动(无势能),用极坐标 (r,ϕ) 描述:
T=21m(r˙2+r
L=21m(r˙2+r
观察到 L 不含 ϕ,故 ϕ 为循环坐标,对应守恒的广义动量为:
pϕ=∂ϕ˙∂L=
这正是粒子对原点的角动量 Lz,它的守恒来源于系统关于原点的旋转对称性。
拉格朗日方程的典型应用
二维各向同性谐振子
质量为 m 的质点在平面内受弹性力约束,弹力指向原点,弹性系数均为 k(各向同性)。用笛卡尔坐标 (x,y):
T=21m(x˙2+
L=21m(x˙2+
对 x 和 y 分别写出拉格朗日方程:
mx¨+kx=0,my¨+ky=0
两个方向的振动相互独立,固有角频率均为 ω0=k/m。通解为:
x(t)=A1cos(ω0t+φ
当相位差 φ1−φ2=0 或 π 时,轨迹为直线;当 φ 且 时,轨迹为圆。
平面双摆
平面双摆由两段摆组成:第一段摆长 l1、质量 m1,第二段通过铰链连接在第一段末端,摆长 l2、质量 。以两段摆的偏转角 、(均相对于竖直方向)为广义坐标,系统有两个自由度。
第一个质点的坐标:
x1=l1sinθ1,y
第二个质点的坐标(注意坐标叠加):
x2=l1sinθ1
动能为:
T=21m
势能为:
V=−(m1+m2)gl1
对 θ1 和 θ2 分别写出拉格朗日方程,即得双摆的运动方程(方程较复杂,此处略去展开式)。双摆方程的非线性耦合使其在较大振幅下表现出混沌行为,是经典力学中混沌现象的典型例子。
双摆在小角度下可以近似为两个耦合的简谐振子,方程变为线性,可以用矩阵方法求解简正模式(将在振动理论部分详细讨论)。一旦角度较大,运动将变得极度敏感于初始条件,微小的初始差异会导致运动轨迹的巨大偏离。
两个质量均为 m 的滑块排列在光滑水平面上,两侧各通过劲度系数为 k 的弹簧固定于墙壁,中间通过劲度系数为 k′ 的弹簧相连。取两滑块偏离各自平衡位置的位移 x1、x 为广义坐标:
T=21mx˙12+
V=21kx12+
分别对 x1、x2 写拉格朗日方程:
mx¨1=−kx1+k
mx¨2=−kx2−k
引入简正坐标 q+=x1+x2(同相模式)和 (反相模式),两个方程解耦:
mq¨+=−kq+,ω
mq¨−=−(k+2k
同相模式中两滑块同步运动,中间弹簧不伸缩,频率较低;反相模式中两滑块反向运动,中间弹簧压缩/拉伸最大,频率较高。
练习题
- 1. 一个质点在平面内运动,用极坐标 (r,ϕ) 描述,若拉格朗日函数为 L=21m(r,则下列说法正确的是:
A. r 是循环坐标,对应的广义动量守恒
B. ϕ 是循环坐标,对应的广义动量 pϕ=mr2ϕ˙ 守恒
C. 两个广义动量都守恒
D. 两个广义动量都不守恒
答案:B
分析:循环坐标的判断依据是 ∂L/∂qj=0。检查 ∂L/∂ϕ:由于 L 中不含 ϕ(只含 ),故 , 是循环坐标,对应广义动量 守恒,这正是角动量守恒。而 (一般情况下), 不是循环坐标,对应的 方向动量不守恒。故选 B。
A. 广义坐标必须是直角坐标系中的位置分量
B. 广义坐标的数目等于系统中质点的总数
C. 广义坐标的数目等于系统的自由度数,可以是角度、弧长等任意形式
D. 广义速度的量纲必须是 m/s
答案:C
分析:广义坐标的选取是灵活的,只要能够完整描述系统的构型即可,不必是直角坐标,可以是角度、弧长、面积等,因此 A、D 错误。广义坐标的数目等于系统的自由度 s=3N−k,而不是质点数 N(有约束时 s<3N),故 B 错误。C 正确。例如单摆的广义坐标是摆角 θ,广义速度 的量纲是 ,而非 。
- 3. 哈密顿原理(最小作用量原理)中,作用量 S=∫t1t2Ldt 的“驻值条件”意味着:
A. 真实运动路径使作用量为零
B. 在满足边界条件的所有路径中,真实路径使作用量的一阶变分为零
C. 真实运动路径总是使作用量取极大值
D. 只有保守系统才能用哈密顿原理描述
答案:B
分析:哈密顿原理要求 δS=0,即在两端时刻 t1、t2 处坐标固定的前提下,对路径做任意微小变动,作用量的一阶变分为零(驻值条件),不要求作用量本身为零(排除 A)。驻值可以是极小、极大或鞍点,并非必然是极小(排除 C 中的“总是极大值”)。对于非保守力(如摩擦力),如果用“广义势”等方法引入,哈密顿原理也可以推广,排除 D。故选 B。
- 4. 对于不显含时间的拉格朗日函数(∂L/∂t=0),能量函数 h=∑iq 满足:
A. h 一定等于动能 T
B. h 随时间变化,不守恒
C. h 守恒,且当动能是广义速度的二次齐次函数、势能不含速度时,h=T+V
D. h 守恒,但 h 始终为负值
答案:C
分析:当 ∂L/∂t=0 时,可以直接对 h 求时间导数并利用拉格朗日方程,证明 dh/dt=0,即 h 守恒,排除 B 和 D(h 可正可负,取决于初始能量)。当 是广义速度的二次齐次函数时,由欧拉齐次函数定理 ;若 不含速度,则 ,故 ,即机械能。 不等于 (排除 A),故选 C。
- 5. 质量为 m=1kg、摆长为 l=1m 的单摆,用拉格朗日方程推导其运动方程,并在小角度近似下求固有角频率 ω0 和周期 (取 )。
解:
取悬挂点为势能零点,摆角 θ 为广义坐标。
动能:T=21ml2θ˙
- 6. 两个质量均为 m=0.5kg 的滑块在光滑水平面上,分别通过劲度系数 k=8N/m 的弹簧连接到两侧固定墙壁,两滑块之间通过劲度系数 k′= 的弹簧相连。用拉格朗日方程求出两个简正模式的角频率 和 。
解:
设两滑块偏离平衡位置的位移分别为 x1、x2(向右为正),作为广义坐标。
动能:
T=