简谐运动的基础
自然界中的振动现象极为普遍。荡秋千时座椅的来回摆动,拨动吉他弦后听到的持续鸣响,手腕上石英表内晶体的规律跳动——这些都是振动的表现。振动的形式各式各样,但其中最简单、最基础的一类,被称为简谐运动。掌握简谐运动的描述方法,是理解一切振动与波动现象的起点。
振动无处不在
观察生活中的各种运动,会发现一类特殊的运动模式:物体在某个固定位置附近来回运动,且每隔相同的时间重复一次完整的运动过程。钟摆每隔固定的时间摆到左边,再回到右边,再回到中间,这一过程不断重复;弹簧玩具被压缩后弹起,再被压下,往复不止。这种在平衡位置附近周而复始的运动,统称为振动,也叫做周期运动。
描述振动最基本的量,是完成一次完整振动所需的时间,称为周期,记作 T,单位是秒(s)。与之对应的,是单位时间内完成振动次数,称为频率,记作 f,单位是赫兹(Hz)。两者互为倒数:
f=T1
自然界和工程中振动系统的周期和频率跨度极大,下表列出了几个典型例子:
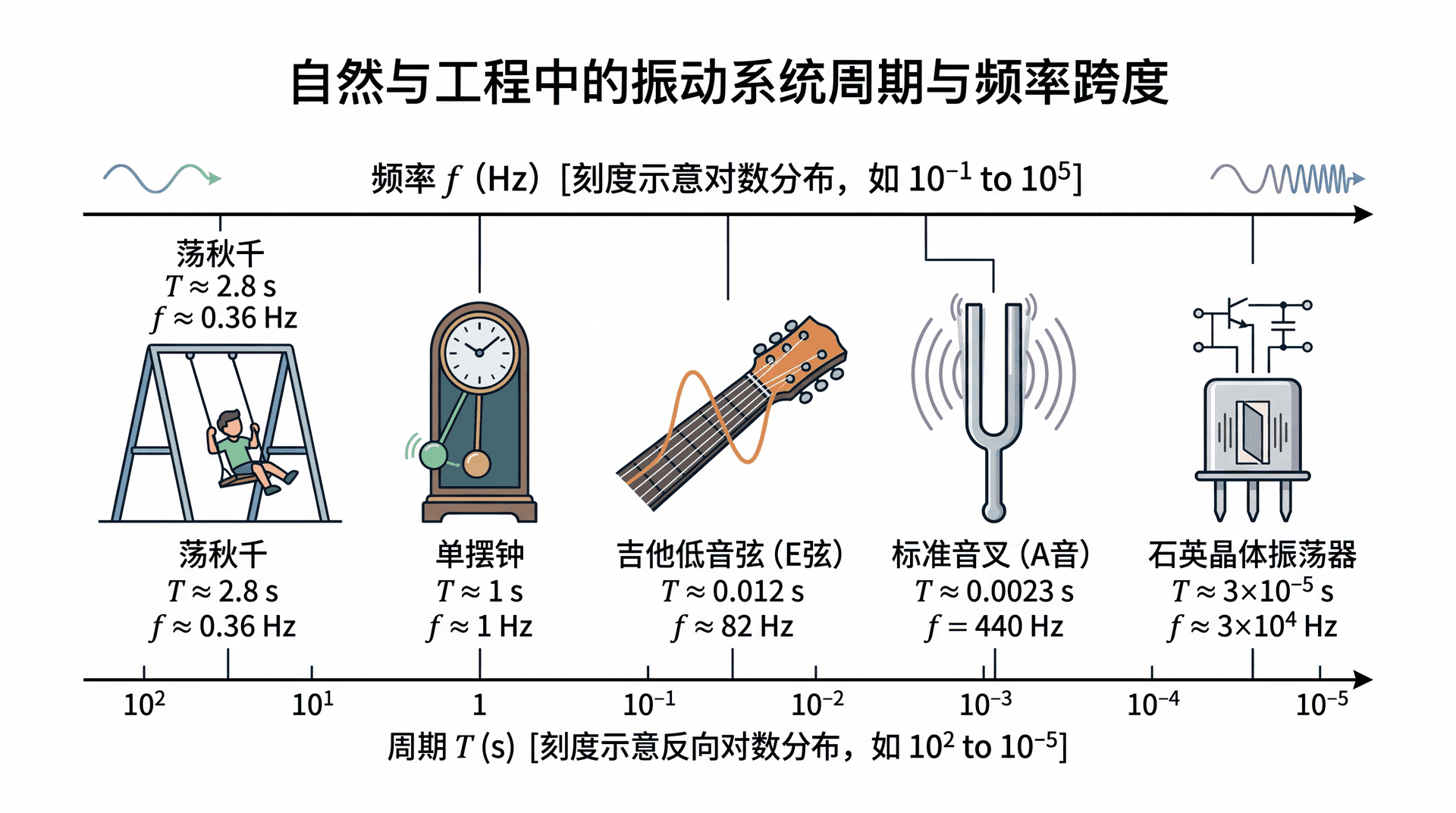
这些系统的周期相差数百万倍,但描述它们运动规律的数学形式完全相同。
正弦振动的描述
取一根弹簧,竖直悬挂,下端挂一个小球。将小球向下拉开一段距离后松手,小球便在竖直方向上反复振动。用传感器记录小球偏离平衡位置的距离(即位移)随时间的变化,会得到一条光滑的曲线。这条曲线,正是数学中的正弦(或余弦)函数图像。
这种位移随时间做正弦变化的振动,就是简谐运动。它是所有振动形式中最基础、最规则的一种。
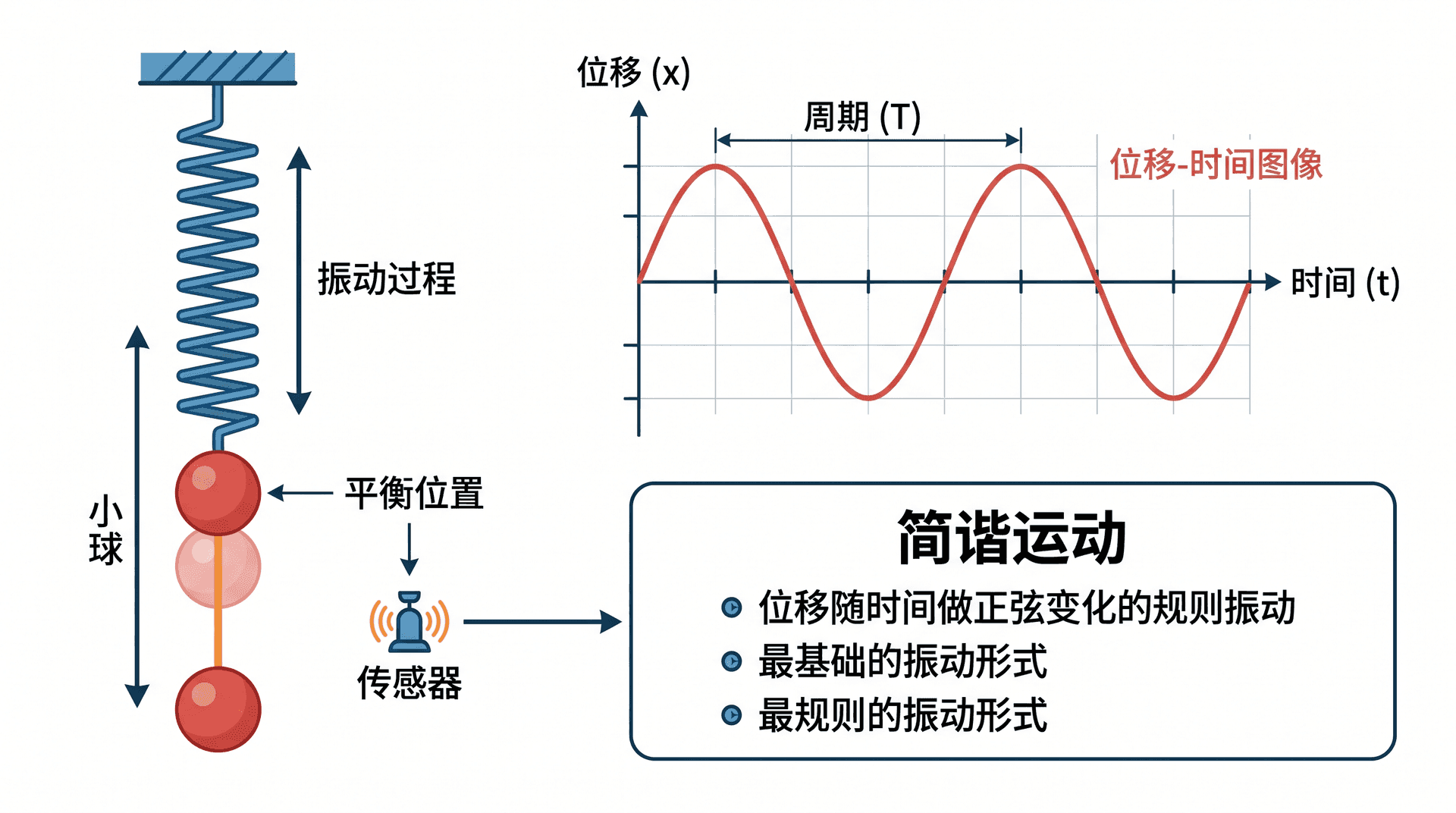
简谐运动的位移-时间图像是一条标准的正弦或余弦曲线。这种运动之所以特殊,是因为弹簧对小球的恢复力与位移成正比、方向相反——正是这个线性恢复力,决定了运动的正弦规律。
为了更直观地理解,来看一组弹簧振子的实测数据(振幅 5 cm,周期 1 s):
数据完整对应余弦函数 x=5cos(2πt)(单位:cm)。每过 1 s,运动状态精确重复,这正是周期运动的核心特征。
简谐运动的基本方程
描述简谐运动最标准的数学形式为:
x=Acos(ωt+ϕ)
其中 x 是质点在 t 时刻偏离平衡位置的位移,A、ω、ϕ 是三个描述振动状态的参数,它们共同决定了这个振动“长什么样”。
将这个方程画出来,就是一条在 [−A, A] 之间来回摆动的余弦曲线,曲线的高低幅度由 A 决定,振动的快慢由 ω 决定,曲线的起始位置由 ϕ 决定。
x=Acos(ωt+ϕ) 这个形式是描述简谐运动的“标准语言”。见到任何一个简谐运动的方程,第一步都是将其对照这个标准形式,分别读取 A、ω、ϕ 的值。
例题 已知某质点做简谐运动,方程为
x=0.10cos(4πt+3π) m
对照标准形式 x=Acos(ωt+ϕ),可以直接读出:
由角频率可进一步求出周期:T=2π/ω=2π/(4π)=0.5 s,频率 f=1/T=2 。
振幅、周期与角频率
简谐运动方程的三个参数,各自对应一个明确的物理含义。
-
振幅 A:质点偏离平衡位置的最大距离,单位为 m。振幅越大,振动越剧烈,振动系统储存的能量也越多。振幅不影响振动的快慢。
-
周期 T:完成一次完整振动所需的时间,单位为 s。周期完全由振动系统本身的物理特性决定(如弹簧的劲度系数、摆的长度),与振幅无关。
-
角频率 ω:单位时间内相位变化的弧度数,单位为 rad/s。角频率与周期、频率的关系为:
ω=T2π=2πf
三个参数的完整对照如下:
振幅、周期、初相位三者互相独立——改变振幅不影响周期,改变周期不影响振幅。这与生活经验吻合:无论秋千荡得高还是低,来回一次的时间几乎相同。
例题 一质点做简谐运动,周期 T=0.4 s,振幅 A=6 cm,t=0 时质点在平衡位置并向正方向运动。求运动方程,并计算 t=0.1 s 时的位移。
首先计算角频率:
ω=T2π=0.42π=5π
t=0 时质点在平衡位置向正方向运动,位移为零且速度为正,对应正弦函数的起始状态:
x=6sin(5πt) cm
代入 t=0.1 s:
x=6sin(5π×0.1)=6sin(2π
质点此时恰好到达正方向最大位移处。
初相位的含义
在方程 x=Acos(ωt+ϕ) 中,括号内的整个表达式 (ωt+ϕ) 称为相位,它是随时间线性增大的量,完整描述了质点在振动循环中所处的“阶段”。t=0 时刻的相位值 ,就是。
初相位决定了振动从哪个状态出发。下面以相同振幅 A、相同角频率 ω 的振动为例,比较不同初相位对应的出发状态:
初相位的取值通常限定在 (−π, π] 范围内,单位为弧度(rad)。改变初相位,相当于将位移-时间曲线在时间轴上平移,振幅和频率均不受影响。
例题 两个完全相同的弹簧振子,角频率均为 ω=π rad/s,振幅均为 A=4 cm。振子甲在 t=0 时从平衡位置向正方向运动;振子乙在 t=0 时位于正最大位移处。写出两者的运动方程。
振子甲的出发状态:x0=0,速度为正。用正弦函数自然描述:
x1=4sin(πt) cm
振子乙的出发状态:x0=A=4 cm,速度为零。用余弦函数:
x2=4cos(πt) cm
两式都是合法的简谐运动方程。实际上,4sin(πt)=4cos(πt−π/2),所以两振动的初相位相差 π/2,振子乙超前振子甲四分之一周期。
相位差与振动的比较
当两个简谐运动的频率相同时,可以通过比较它们的相位来判断运动状态的先后关系。
设两个振动分别为:
x1=Acos(ωt+ϕ1),x
两者的相位差定义为:
Δϕ=ϕ1−ϕ2
相位差的物理意义,在于描述两振动在时间上的超前或滞后:
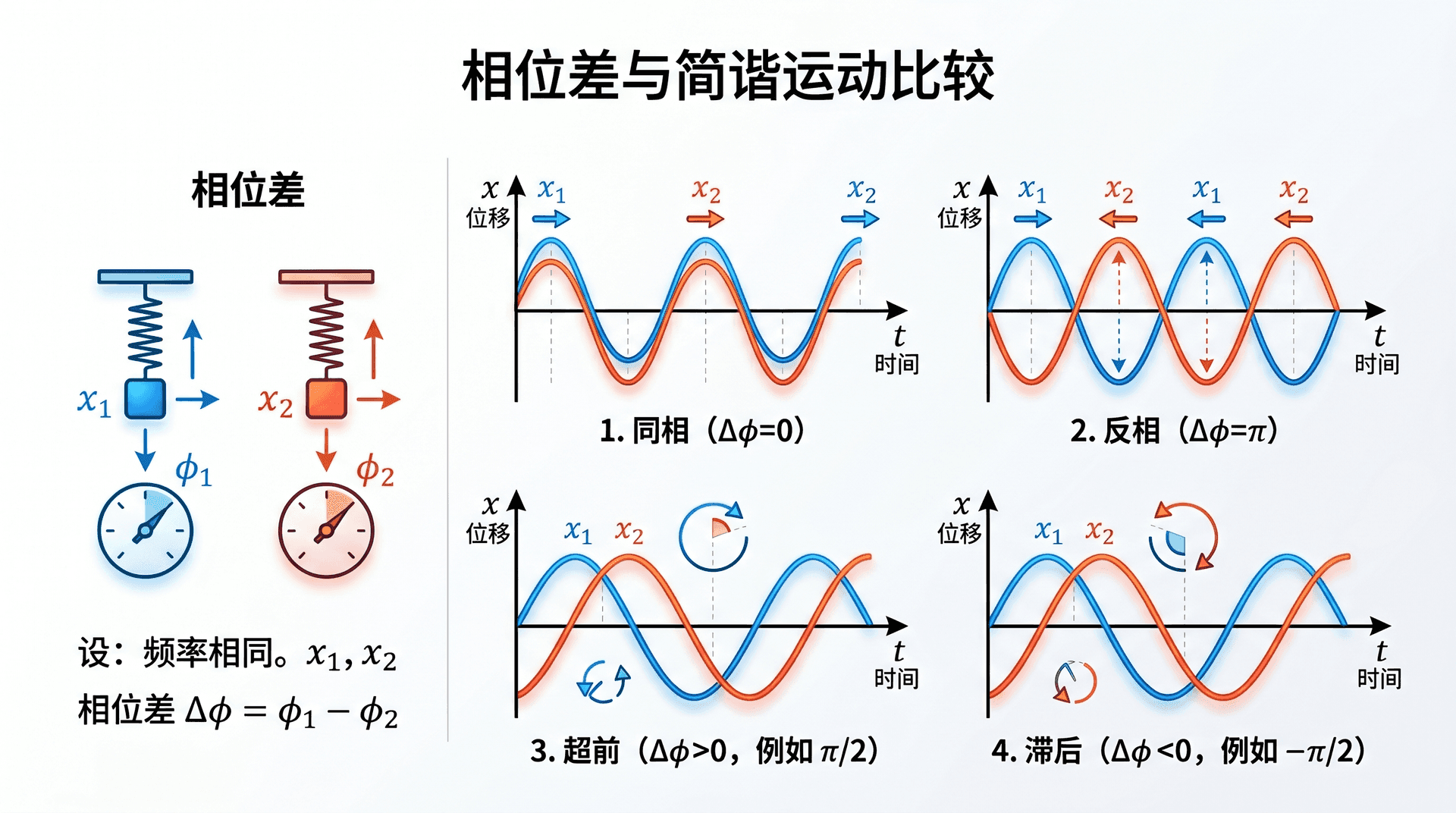
判断超前还是滞后时,一定要计算 ϕ1−ϕ2,而不是取绝对值。正值表示 x 超前,负值表示 滞后。
例题 两列简谐振动的方程为:
x1=3cos(2t+3π
求相位差,并判断超前滞后关系。
Δϕ=ϕ1−ϕ2=
相位差为 π/2>0,说明 x1 超前 x2,超前量为四分之一周期(T)。在图像上, 的曲线比 整体向左平移了四分之一周期的距离。
旋转矢量表示法
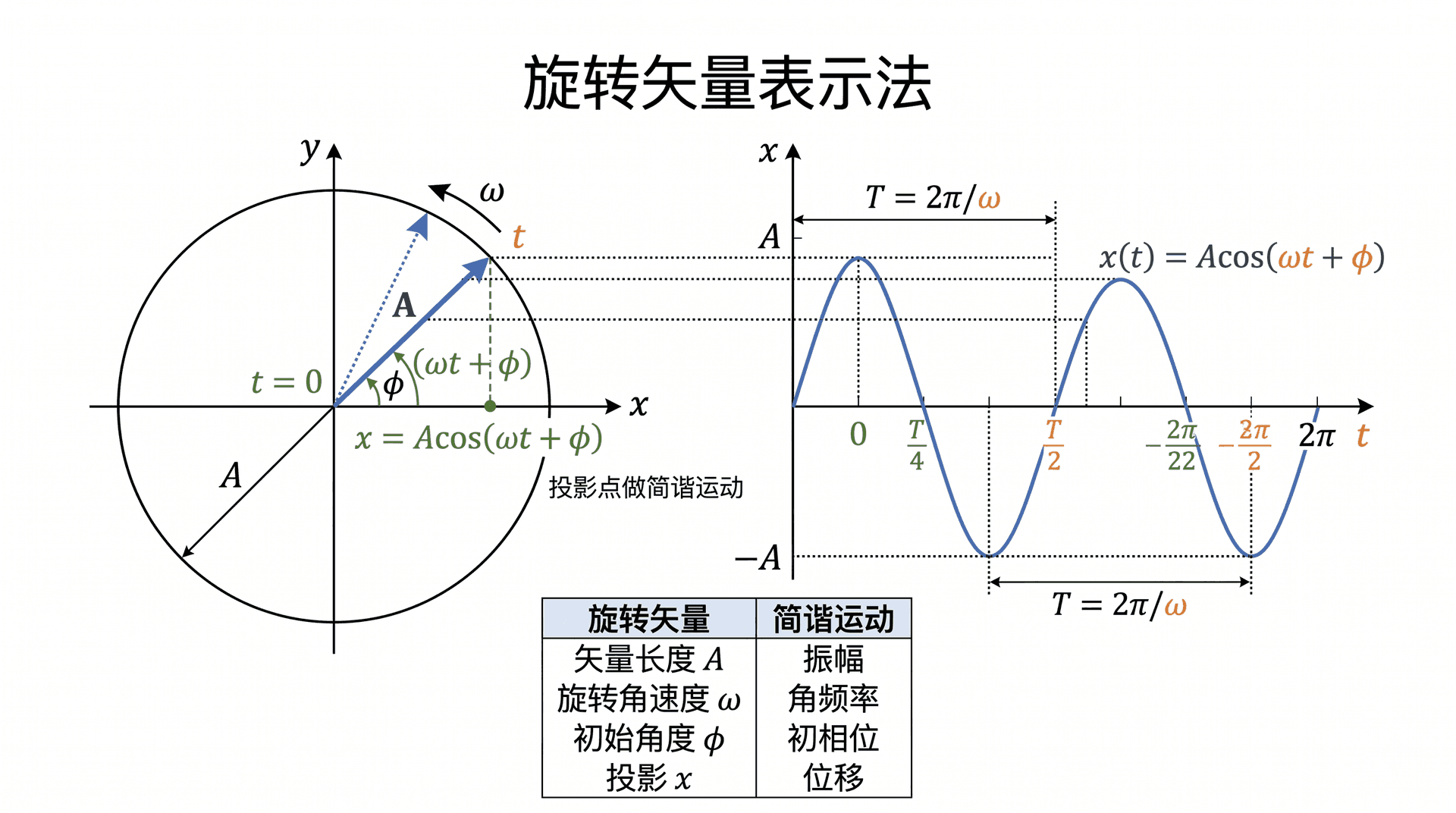
除了方程和图像,简谐运动还有一种直观的几何表示方式——旋转矢量法。
在平面上,取一个长度等于振幅 A 的矢量,令其从初始角度 ϕ 出发,以角速度 ω 绕原点逆时针匀速旋转。在任意时刻 t,该矢量与 x 轴正方向的夹角为 (ωt+ϕ),其在 轴上的投影恰好等于:
x=Acos(ωt+ϕ)
这就是简谐运动的位移。因此,旋转矢量端点在某一轴上的投影,做简谐运动。
旋转矢量法的优势在于将抽象的相位转化为直观的角度:
旋转矢量法不是用来代替方程计算的,而是用来快速判断相位关系的直观工具。两个简谐运动的相位差,就是它们对应的旋转矢量在任意时刻的夹角大小。
例题 用旋转矢量法分析 x=4cos(πt+4π) cm 在 t= 时刻的状态。
t=0 时,旋转矢量与 x 轴正方向成 ϕ=π/4(即 45°)角。矢量在 x 轴的投影为:
x0=4cos4π=4×
矢量处于第一象限,随时间逆时针旋转,下一时刻投影沿余弦规律减小(矢量转向 90° 时投影变为零,再转向 180° 时投影变为 −4 cm)。
例题 两列振动方程为 x1=5cos(ωt+6π) 和 ,用旋转矢量法说明 时两矢量的位置关系。
t=0 时,矢量1与 x 轴成 +30°(逆时针),矢量2与 x 轴成 −60°(顺时针)。两矢量夹角为 30°+,即相位差 。矢量1超前矢量2,对应 超前 四分之一周期。
练习题
选择题
第1题 某质点做简谐运动,其运动方程为 x=0.2cos(6πt+4π) m,则该质点振动的频率为( )
A. 3 Hz B. 6 Hz C. 6π Hz D. 31 Hz
答案:A
由方程读取角频率 ω=6π rad/s,利用 ω=2πf 求频率:
f=第2题 两列简谐振动的方程分别为 x1=Acos(ωt) 和 x2=,下列说法正确的是( )
A. x1 超前 x2 四分之一周期
B. x2 超前 x1 四分之一周期
C. 两振动同相,图像完全重合
D. 两振动反相,图像关于时间轴对称
答案:B
相位差 Δϕ=ϕ1−ϕ2=0−,说明 滞后于 ,即 超前 四分之一周期。选 B。
第3题 一质点做简谐运动,在 t=0 时刻位于负最大位移处,振幅为 A,角频率为 ω,则该运动方程为( )
A. x=Asin(ωt)
B. x=Acos(ωt)
C. x=−Acos(ωt)
D. x=Acos(ωt+2π)
答案:C
t=0 时质点在负最大位移处,即 x0=−A。
代入选项 A:x0=,不符合;
第4题 关于简谐运动振幅与周期的关系,正确的说法是( )
A. 振幅越大,周期越长,振动越慢
B. 振幅越大,频率越高,振动越快
C. 振幅与周期互相独立,改变振幅不影响周期
D. 振幅与角频率成反比
答案:C
对于简谐运动,振幅 A 和周期 T(或频率 f、角频率 ω)是相互独立的参数。周期由振动系统的物理特性决定(如弹簧的劲度系数、摆的绳长),与振动幅度无关。这也是为什么秋千无论荡高荡低,周期几乎不变。选 C。
计算题
第5题 一质点做简谐运动,振幅 A=8 cm,周期 T=2 s,t=0 时质点在平衡位置且向负方向运动。
(1)写出该质点的运动方程;
(2)分别求 t=0.5 s、t=1.0 s、t=1.5 s 时刻的位移,列表对比,并说明质点在各时刻所处的位置。
解:
(1)计算角频率:
ω=T2π=22π=π第6题 两列简谐振动的方程分别为:
x1=6cos(4t−6π
(1)求两列振动的相位差,并判断哪列振动超前;
(2)t=0 时,分别求两质点的位移,并说明旋转矢量法下两矢量的角度关系。
解:
(1)相位差:
Δϕ=ϕ1−ϕ2=(−