高级树:从平衡不变式到磁盘友好的多路索引
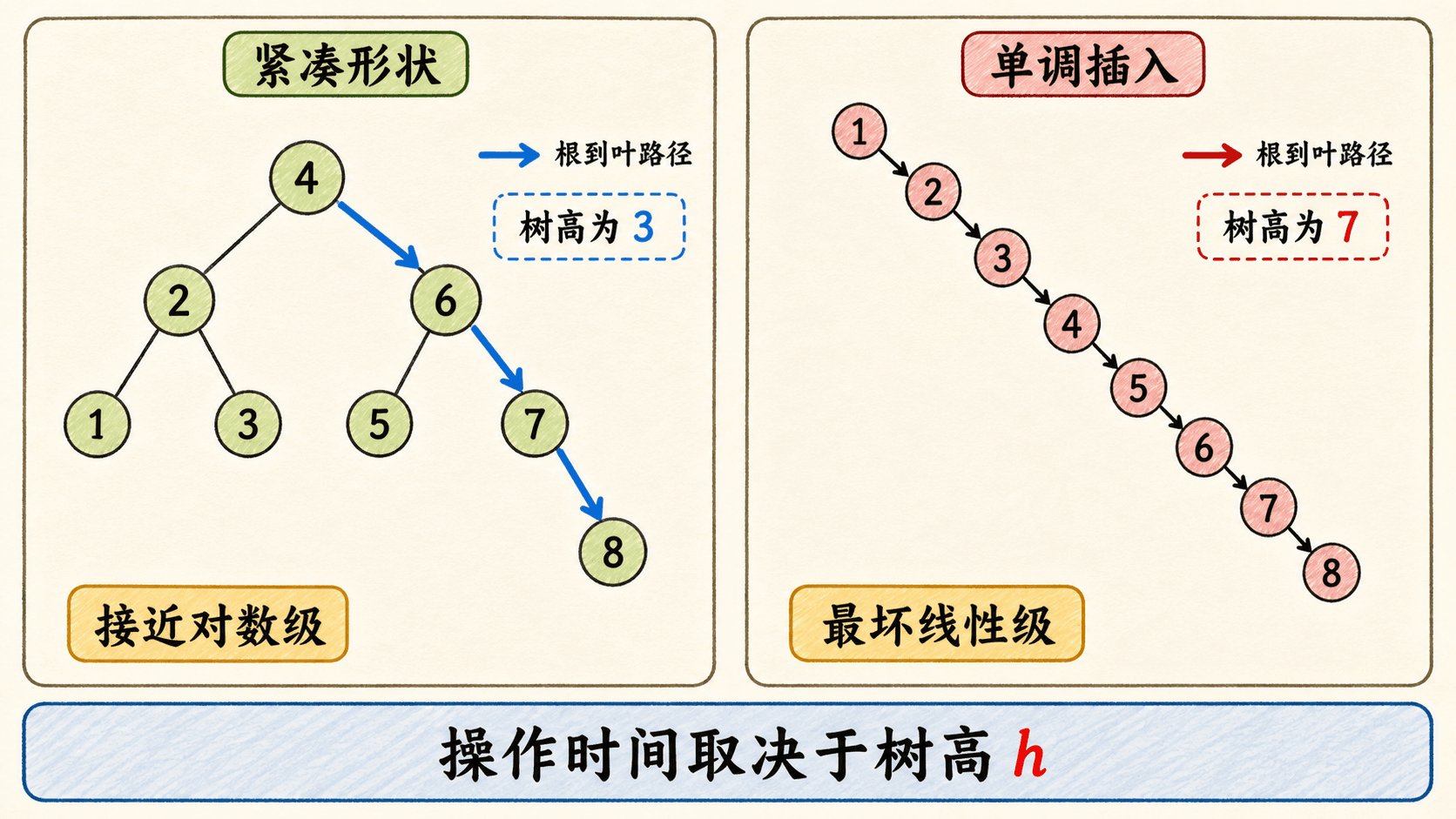
二叉搜索树最迷人的地方,也是它最危险的地方:树的形状完全取决于更新顺序。同一批键,换一个插入次序,可能得到接近完全平衡的树,也可能得到一条长链。搜索、插入和删除都只走一条根到叶的路径,所以真正决定性能的不是“有多少个节点”,而是“这条路径有多长”。
高级树的设计可以归结为同一个问题:我们愿意维护什么额外不变式,来换取可预测的路径长度?AVL 树严格限制左右子树高度差;红黑树用较宽松的颜色约束控制最长路径;顺序统计树和区间树在平衡树上维护可局部更新的摘要;B 树则把一个节点扩成一整页,让一次外存访问带回许多键。
本文默认键互不相同。若业务允许重复键,应明确规定“重复项总放右侧”、为节点保存计数,或用 (键, 唯一序号) 组成复合键。只写一句“左边小、右边大”却不定义相等键的去向,会让插入、排名和删除的语义在边界处失去一致性。
二叉搜索树是所有平衡方案的基线
二叉搜索树的核心不变式作用于每个节点,而不只是根。对节点 :左子树所有键都小于 ,右子树所有键都大于 ;两棵子树还要递归满足同样的条件。于是中序遍历按“左子树、当前节点、右子树”访问时,得到严格递增序列。
查询都在一条路径上完成
搜索键 时,从根开始比较。若 就进入左子树,若 就进入右子树。最小值沿左指针到底,最大值沿右指针到底。查找后继则分两种情况:
- 若 有右子树,后继是右子树中的最小节点。
- 若 没有右子树,就沿父指针向上,直到第一次从某个祖先的左侧回来;这个祖先就是后继。若始终从右侧回来,则 已经是最大节点,没有后继。
这些过程最多走树高 条边,因此时间都是 。中序遍历不同,它会访问每个节点一次,时间是 ,与树是否平衡无关。
插入简单,删除要分清“删谁”和“谁补位”
插入先执行一次失败的搜索,把新节点接到最后遇到的父节点下面。删除节点 时有三种结构情形:
- 左子树为空,用右子树替换 。
- 右子树为空,用左子树替换 。
- 两棵子树都非空,取右子树最小节点 ,也就是 的后继。若 不紧挨着 ,先用 替换 ,再把 接给 ;最后用 替换 ,并把 接给 。
“替换”只改父子链接,不会自动接管被替换节点的孩子。把这个细节写进独立的 TRANSPLANT 操作,能避免双子节点删除时丢失子树。
text
BST-DELETE(T, z)
若 z.left 为空:用 z.right 替换 z
否则若 z.right 为空:用 z.left 替换 z
否则:
y = z.right 中的最小节点
若 y.parent != z:
用 y.right 替换 y
y.right = z.right
用 y 替换 z
y.left = z.left高度才是性能变量
若按 1, 2, 3, …, n 插入,树会退化成高度 的右链,基本操作最坏为 。一棵含 个节点的二叉树,高度至少为 ;只有形状足够紧凑时,操作才接近 。
随机顺序插入互异键时,期望高度是 ,但“期望”不是最坏情况保证。只要输入顺序可被外部控制,或者服务需要稳定尾延迟,就应维护显式的平衡条件。
小测
1
在高度为 h 的二叉搜索树中,搜索、最小值、后继操作的最坏时间共同是什么?
2
删除一个同时拥有左右孩子的 BST 节点 z 时,下列哪些说法正确?
AVL 树用严格高度差换取更短路径
AVL 树仍是二叉搜索树,但每个节点还维护子树高度。若空子树高度记为 、叶子高度记为 ,节点 的高度与平衡因子是
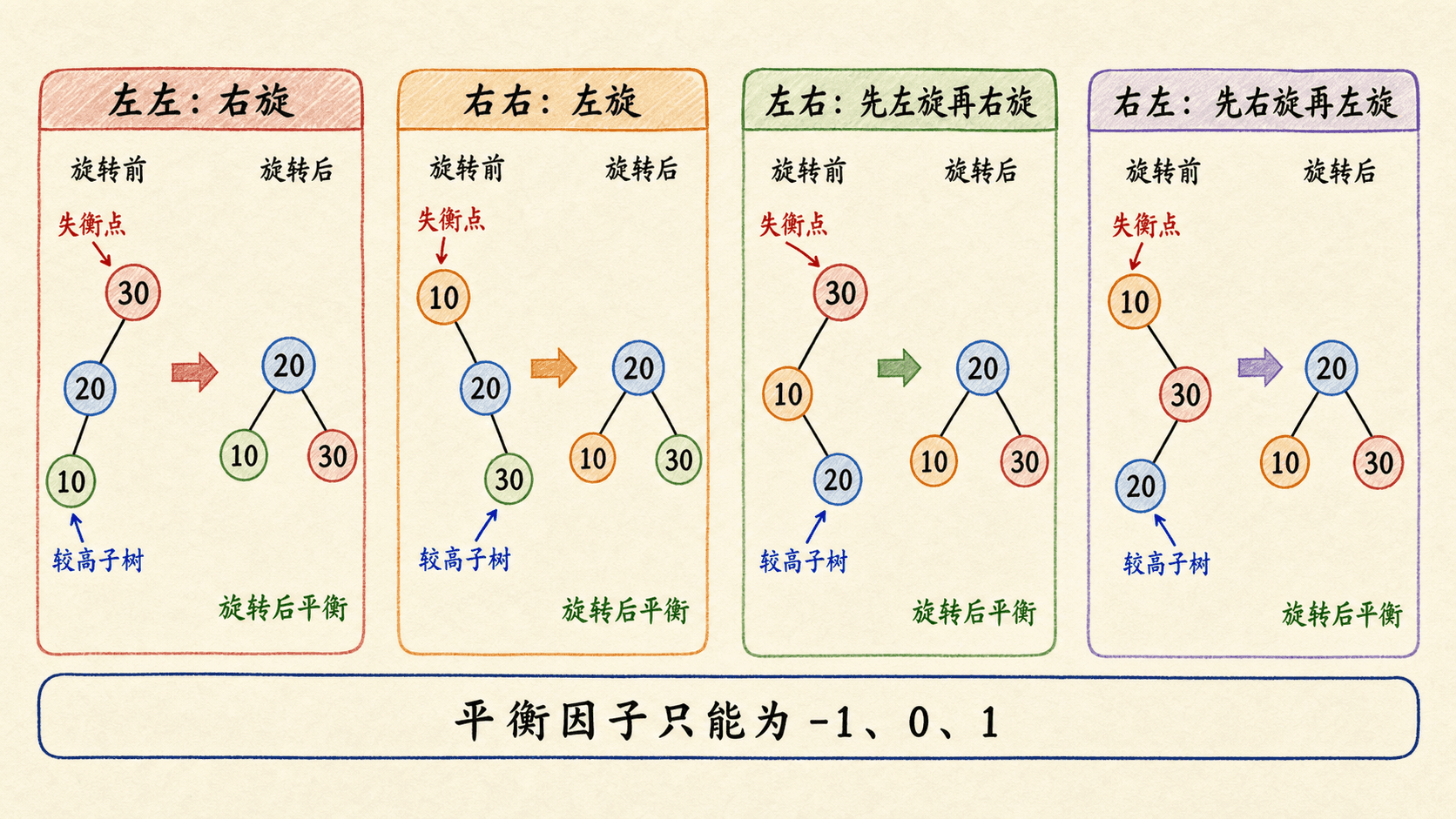
合法 AVL 树要求每个节点的平衡因子只能是 、 或 。更新一个节点后,必须从它向根回溯,先更新孩子较低处的高度,再更新祖先高度;顺序反过来会让祖先读到旧值。
为什么高度一定是对数级
设 是高度为 的 AVL 树至少需要的节点数。要让节点尽量少又恰好达到高度 ,两棵孩子子树的高度应为 和 ,于是
这个递推与斐波那契数列同阶增长,因此 ,其中 。反过来得到 。这份保证来自每个节点的局部高度差,而不是输入的随机性。
四种失衡形状其实只有两种旋转
设第一个失衡祖先为 。若重路径连续向左,是“左—左”形,右旋 ;连续向右,是“右—右”形,左旋 。若重路径先左后右,是“左—右”形,先左旋左孩子,再右旋 ;“右—左”形完全对称。
旋转不改变中序次序。以左旋为例,旋转前的顺序是
旋转后仍是同一顺序,只是 成为局部根、 成为 的左孩子、 改接为 的右子树。
插入修复的边界
AVL 插入先按 BST 规则落到叶子,再沿递归返回路径更新高度并修复第一个失衡点。单旋或双旋能恢复该子树原有高度,所以一次插入只需常数次旋转,总时间由搜索与回溯决定,为 。
这里要谨慎区分插入与删除:删除可能让修复后的子树继续变矮,失衡可以向祖先传播。若实现完整 AVL 删除,不能直接套用“修一次就停止”的插入结论。
小测
3
AVL 节点的左子树高度为 5、右子树高度为 3,则平衡因子 balance=left-right 为 ____。
4
AVL 插入与 AVL 删除都只要修复离更新点最近的一个失衡祖先,就一定可以立即停止。
红黑树用颜色约束给出最坏高度界
红黑树在 BST 节点上增加一位颜色。实现时通常只创建一个共享的黑色哨兵 nil,所有缺失孩子都指向它,根的父指针也指向它。这样修复代码可以读取缺失孩子的颜色,而不必在每一步先判断空指针。
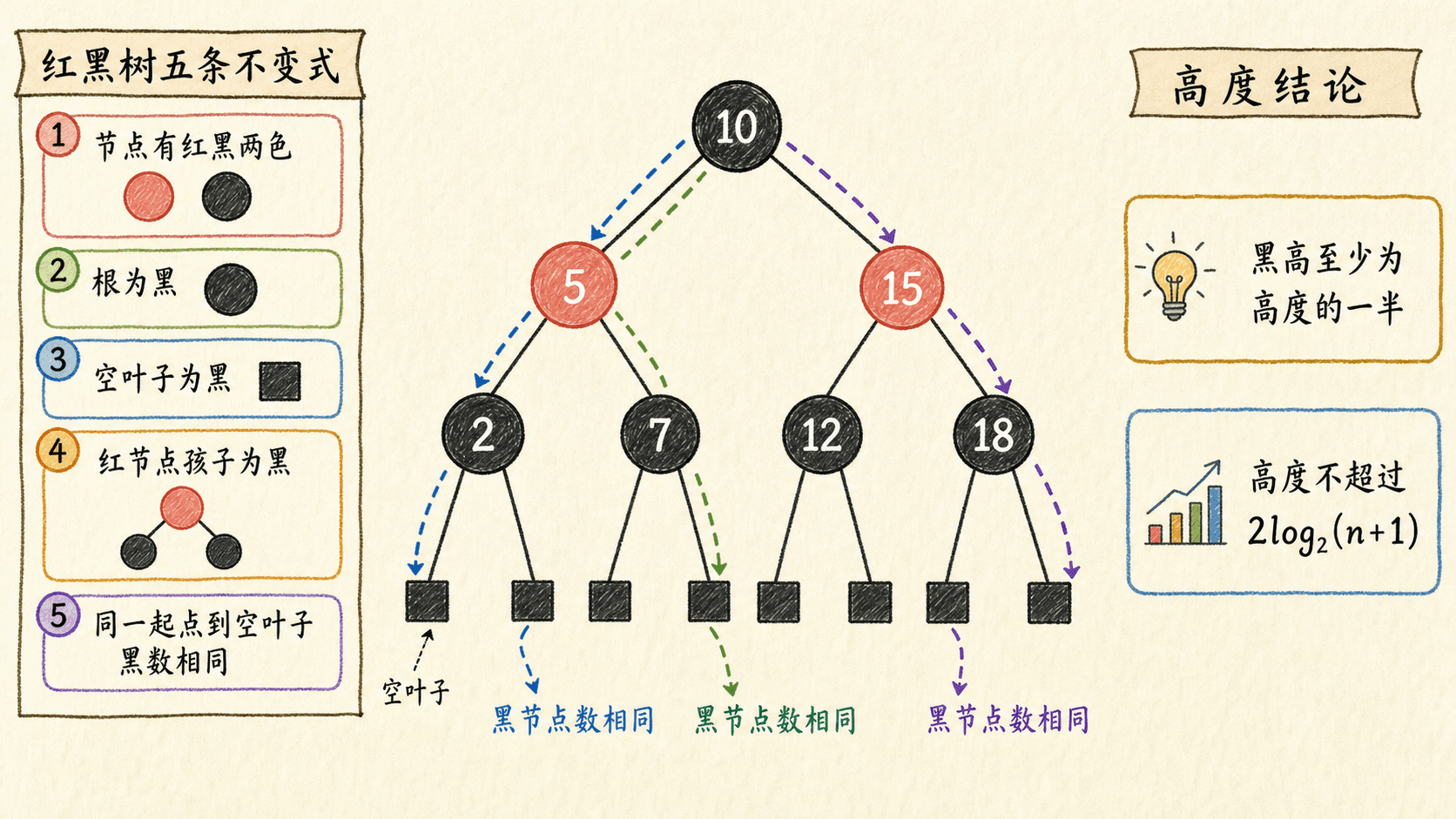
一棵合法红黑树满足五条不变式:
- 每个节点非红即黑。
- 根是黑色。
- 所有
nil叶子都是黑色。 - 红节点的两个孩子都是黑色,也就是根到叶路径上不能出现连续红节点。
- 从任意节点出发,到其所有后代
nil叶子的简单路径包含相同数量的黑节点。
第三条容易被忽略。nil 不保存业务键,却参与颜色与黑高计算;若画图时省略它,证明里仍不能省略。
黑高如何控制整棵树
定义 为从 向下到任一后代 nil 的路径上,不包含 的黑节点数。第五条保证这个数与选择哪条路径无关。
先证明:以 为根、黑高为 的子树,至少含有
个内部节点。对 nil,黑高为 ,结论是 个内部节点。对内部节点,两个孩子的黑高至少是 ;把两个孩子的最小节点数相加,再加当前节点,就得到归纳结论。
再看一条根到叶的最长路径。因为红节点不能连续出现,除根外至少一半节点是黑色,所以根的黑高至少为 。若树有 个内部节点,则
整理得到
因此搜索、前驱、后继、最小值和最大值都有 的最坏时间。红黑树不要求左右子树高度只差一层,它允许更宽松的形状,换来更新时较少的旋转。
“从根到叶黑节点数相同”只是第五条在根上的特例。真正的不变式对每个节点都成立。只检查根到叶路径,会漏掉局部子树中的黑高错误。
小测
5
关于红黑树中的 nil 哨兵,下列哪些说法正确?
6
含 n 个内部节点的红黑树高度 h 至多为 ____。(请填写含 n 的表达式)
旋转与红黑树插入修复
旋转是常数时间的局部指针变换,它保留 BST 的中序顺序。左旋 的前提是 不是 nil。令 ,依次完成:把 接到 ;让 接替 在父节点下的位置;把 设为 。每次改孩子指针时都要同步父指针,根节点旋转时还要更新 。右旋完全对称。
交互演示:旋转改变形状,不改变顺序
点击按钮观察局部树如何变形。演示同时列出中序序列,便于核对旋转前后的有序性。
为什么新节点先染红
按 BST 规则插入新节点 后,把它的两个孩子设为 nil 并将 染红。若染黑,所有经过 的路径都会多一个黑节点,黑高错误可能扩散到许多祖先;染红不会改变任何路径的黑节点数,只可能产生两类局部问题: 是红根,或 与红色父节点相邻。
修复循环只在 z.parent 为红时执行。此时祖父一定存在且为黑。下面描述“父节点是祖父左孩子”的一半情形;另一半交换左右方向即可。
三种插入情形
叔叔为红。 把父亲和叔叔染黑,祖父染红,再令 z 指向祖父继续向上。三条相关路径的黑节点数不变;红红冲突可能被推到更高层。
叔叔为黑,z 是父亲的右孩子。 先令 z 指向父亲并左旋,把折线“左—右”转成直线“左—左”。这一步进入下一种情形,不单独结束。
叔叔为黑,z 是父亲的左孩子。 父亲染黑、祖父染红,再右旋祖父。红红冲突消失,黑高保持不变,循环结束。
text
RB-INSERT-FIXUP(T, z) // 展示父节点在祖父左侧的分支
while z.parent.color == 红:
y = z.parent.parent.right
if y.color == 红:
z.parent.color = 黑
y.color = 黑
z.parent.parent.color = 红
z = z.parent.parent
else:
if z == z.parent.right:
z = z.parent
LEFT-ROTATE(T, z)
z.parent.color = 黑
z.parent.parent.color = 红
RIGHT-ROTATE(T, z.parent.parent)
T.root.color = 黑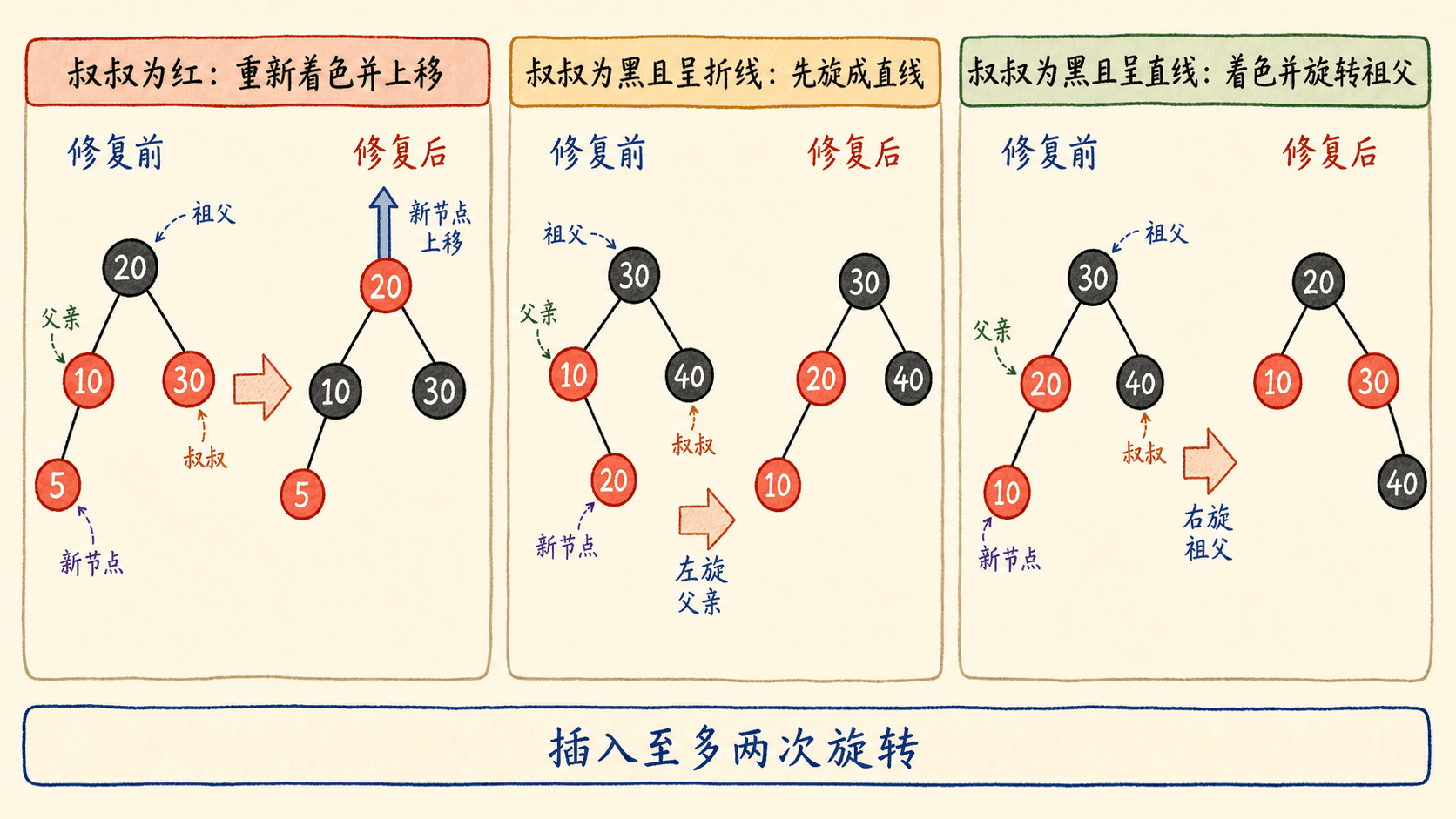
只有“叔叔为红”会让循环再次迭代,而且 z 每次上移两层,所以总时间为 。一次插入至多执行两次旋转;重新着色次数可以是 。
小测
7
红黑树插入时,新节点通常先染成红色,最直接的原因是什么?
8
红黑树插入修复中,只要叔叔为红,就应立即旋转祖父并结束。
红黑树删除修复追踪“额外的一重黑”
红黑删除先执行 BST 删除,但必须额外记住两个对象:实际被移走或搬动的节点 ,以及补到 原位置的节点 。若 有两个孩子, 是 的后继; 被移到 的位置并继承 的颜色,而 保存 在原位置的颜色。
若被移走的 原本是红色,黑高不变,也不会凭空制造相邻红节点,不需修复。若 原本是黑色,经过它原位置的路径少了一个黑节点。可以把这份缺口理解为压到 身上的“额外一重黑”。它是修复算法的逻辑状态,不是第三种颜色;节点字段仍只有红或黑。
即使 是共享 nil,也必须让 x.parent 指向它当前补位位置的父节点,否则修复无法找到兄弟。这里共享哨兵的父指针是过程中的临时导航信息。
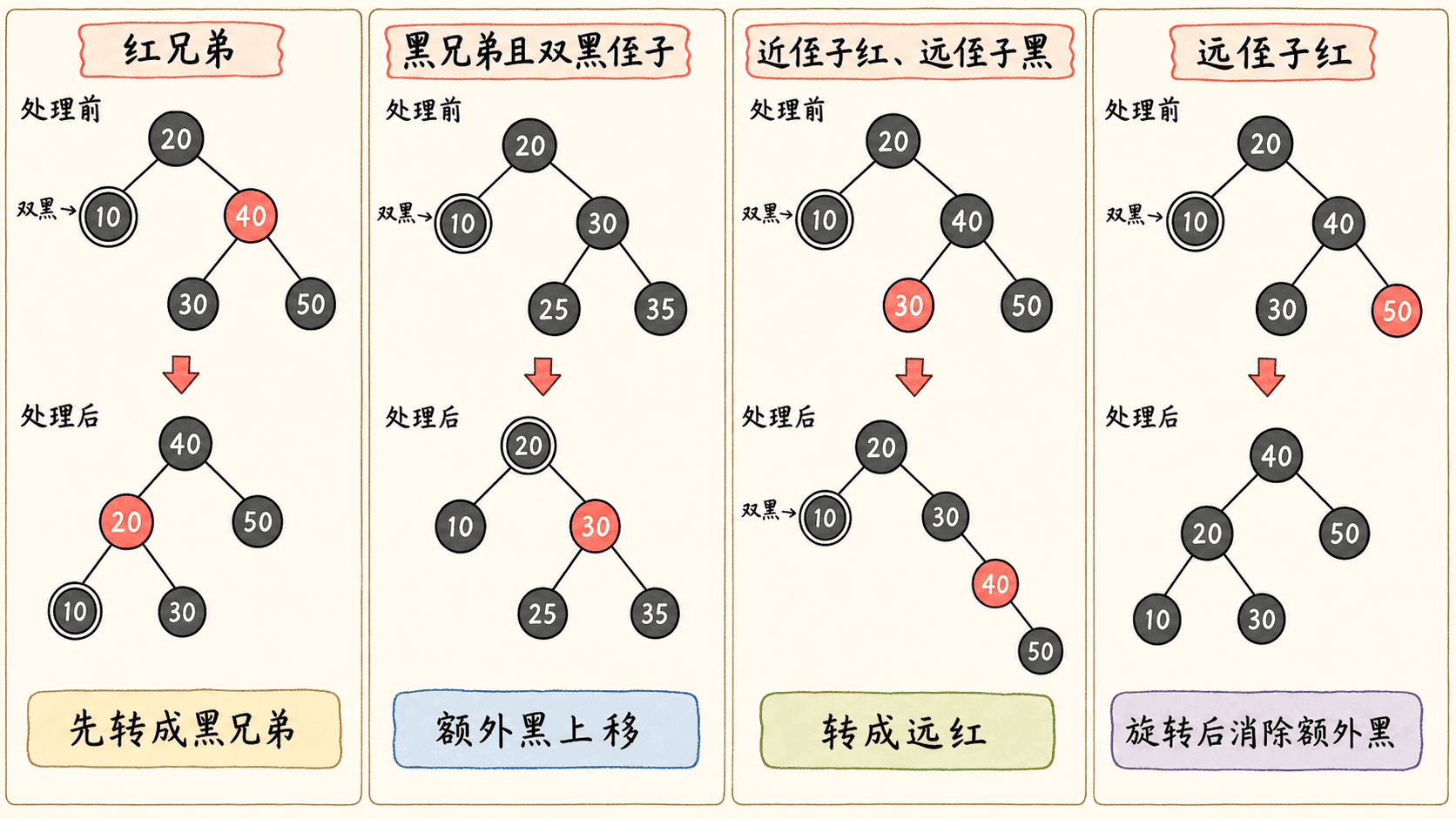
四种删除情形
下面假设 是父节点的左孩子,兄弟 。右孩子情形完全镜像。循环开始时, 是非根的双黑节点; 不可能是 nil,否则两侧黑高在删除前就已不同。
兄弟为红。 父节点必黑,兄弟的孩子必黑。把兄弟染黑、父亲染红,左旋父亲,再重新取兄弟。双黑没有消失,但新兄弟已经是黑色,问题转为后三种之一。
兄弟为黑,两个侄子都黑。 把兄弟染红,相当于从 和 两侧各去掉一重黑,再令 上移到父节点。只有这种情形会把循环继续推向根。
兄弟为黑,近侄子红、远侄子黑。 这里近侄子是 w.left,远侄子是 w.right。近侄子染黑、兄弟染红,再右旋兄弟,把形状转成“远侄子红”的下一种情形。
兄弟为黑,远侄子红。 兄弟继承父节点颜色,父节点染黑,远侄子染黑,左旋父节点。两边黑高恢复,令 指向根以结束循环。
交互演示:根据兄弟与侄子颜色选择情形
选择颜色后,演示会给出应执行的动作。为避免方向混乱,画面固定 在左、兄弟在右。
删除主体沿树高寻找后继并改链接,修复中只有“双黑侄子”情形会反复上移。总时间是 ,一次删除修复至多旋转三次。
小测
9
红黑树删除时,哪些情况会触发删除修复?
10
当双黑节点 x 在左侧、黑兄弟的近侄子为红而远侄子为黑时,应先做什么?
增强树把全局问题变成局部摘要
很多查询不需要发明一棵全新的树。更常见的做法是在一棵最坏高度为 的树上,为每个节点维护一个摘要字段。设计时可以按四步检查:选择底层结构;定义摘要;证明插入、删除和旋转能维护摘要;最后设计新查询。
一个实用判据是:若节点 的摘要只依赖 自身、、 以及两个孩子的摘要,那么一次局部修改只会影响从修改点到根的祖先链。红黑树高度为 ,因此沿祖先链重算不会改变插入和删除的渐进复杂度。旋转只改变两个节点的子树组成,很多摘要还能在 时间内修正。
顺序统计树维护子树规模
给每个节点增加 size,令哨兵的规模为 :
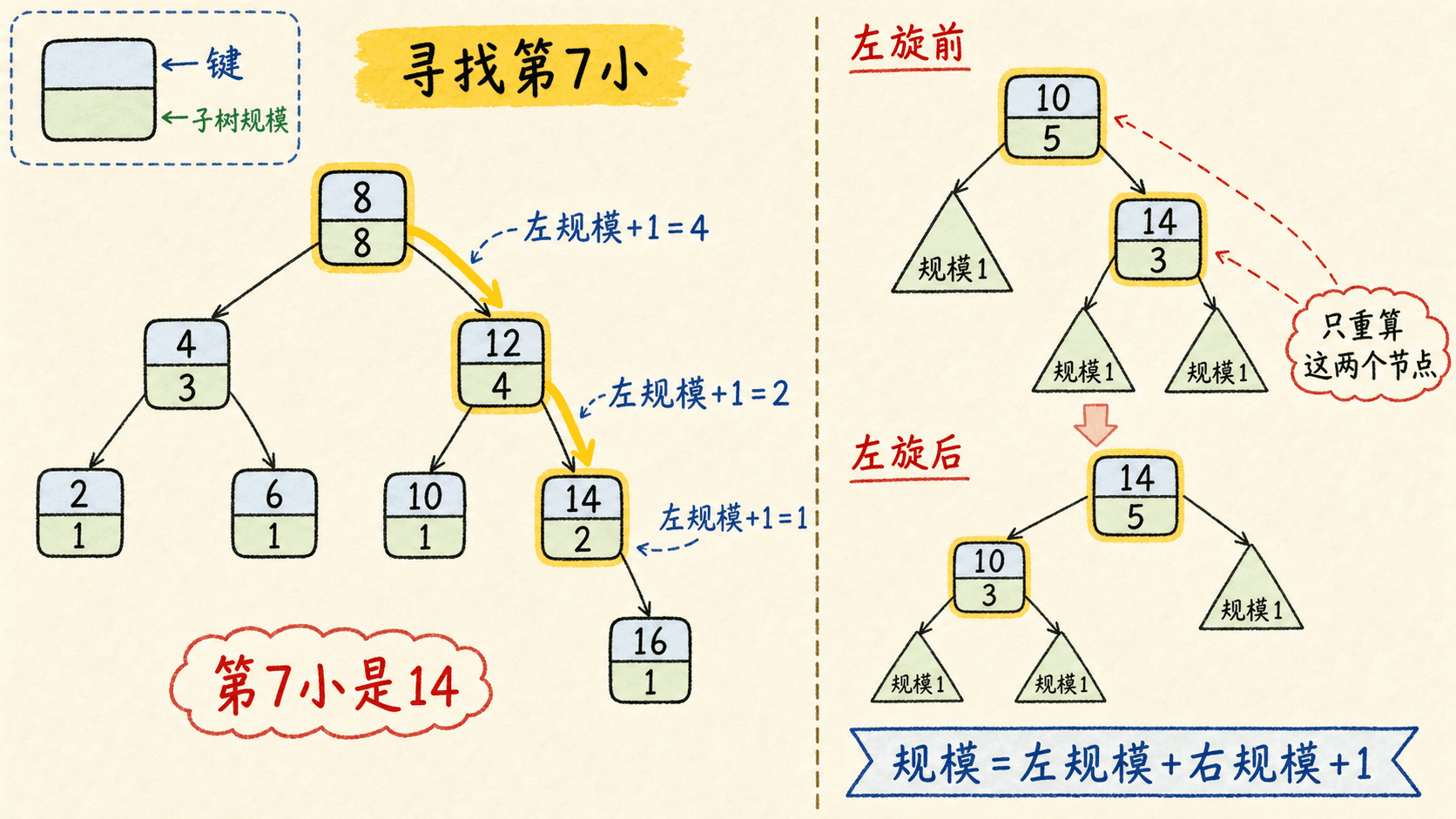
要找当前子树第 小的节点,先计算当前根在子树内的排名
若 就返回 ;若 就去左子树;若 就去右子树寻找第 小。每一步下降一层,所以查询时间为 。
text
OS-SELECT(x, i)
r = x.left.size + 1
if i == r:return x
if i < r:return OS-SELECT(x.left, i)
return OS-SELECT(x.right, i - r)已知节点指针 时,它在整棵树中的排名从 x.left.size + 1 开始。沿父指针上升:若当前节点是父亲的右孩子,父亲及父亲的整棵左子树都排在 前面,需要加上 parent.left.size + 1;若当前节点是左孩子,不增加。到根时得到全局排名。
更新与旋转如何维护 size
插入下降时,沿搜索路径的 size 各加一,新节点规模为一。删除后,从实际移除位置向根重算或递减。以左旋 、令 为例,旋转前 覆盖的节点集合与旋转后局部根覆盖的集合相同,所以先执行
text
y.size = x.size
x.size = x.left.size + x.right.size + 1更新顺序不能颠倒:先重算 ,会丢掉旋转前整个局部子树的总规模。右旋对称。
不要直接给每个节点保存“全局排名”。插入一个新最小值会改变所有旧节点的排名,更新成本是线性的。保存子树规模后,只有一条祖先链需要变化。
小测
11
某节点左子树有 8 个节点,则该节点在自身子树中的排名是第 ____ 小。
12
一个适合在红黑树上维护的增强字段,通常应满足哪些条件?
区间树用最大右端点安全剪枝
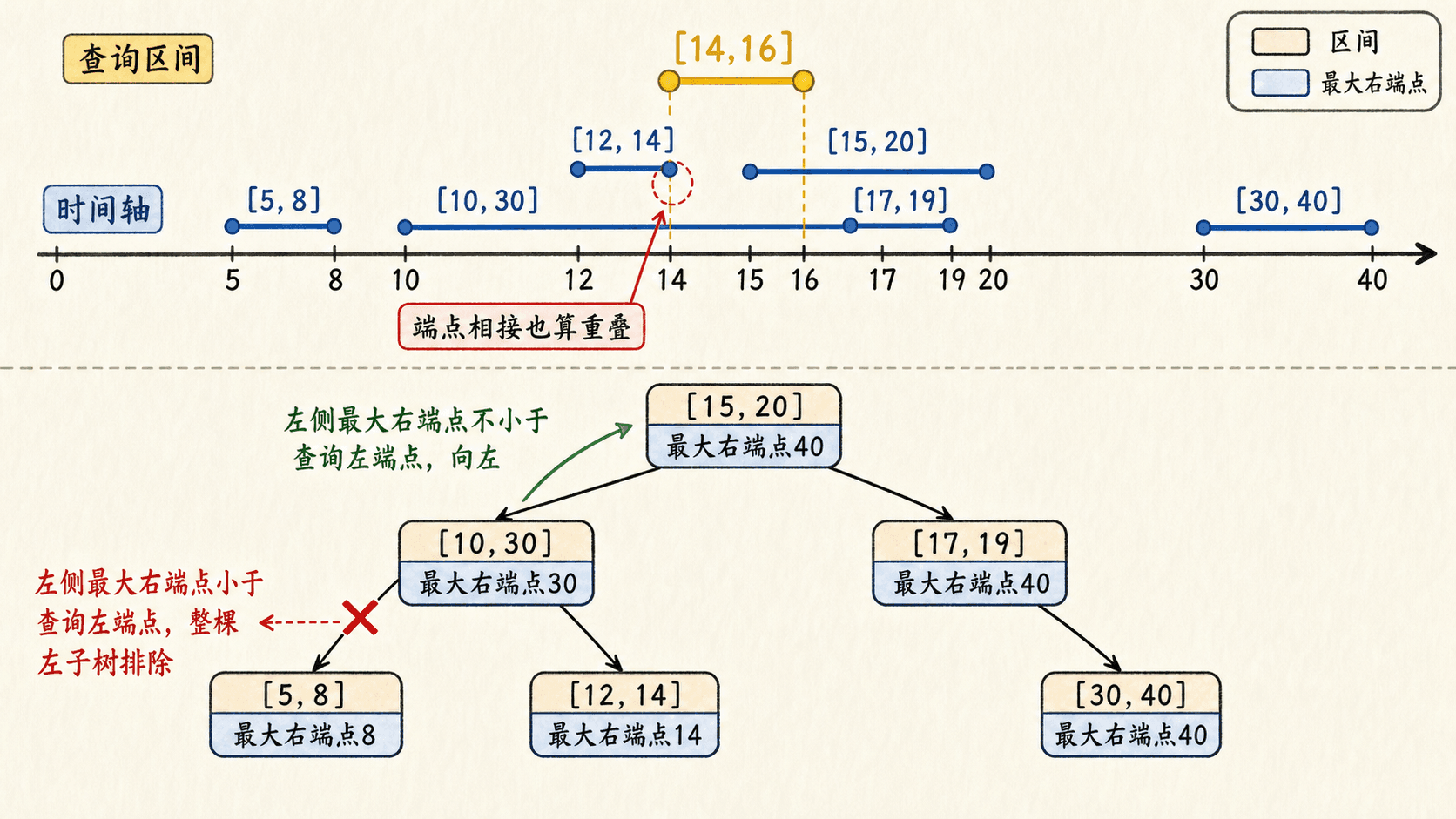
区间树维护一个动态的闭区间集合。闭区间 与 重叠,当且仅当
端点相接的 [2,5] 与 [5,8] 也算重叠。若业务使用开区间或半开区间,等号是否成立必须随语义调整,不能原样复制闭区间判断。
底层红黑树按区间左端点 low 排序。每个节点保存
其中哨兵的 max 可设为 。这个字段只依赖节点和两个孩子,所以插入、删除沿祖先链更新,旋转只需重新计算参与旋转的两个节点。
搜索为何只走一条路
搜索查询区间 时,若当前区间与 重叠就返回。否则,只要左子树存在且 left.max >= q.low,就向左;其余情况向右。
text
INTERVAL-SEARCH(T, q)
x = T.root
while x != nil 且 x.int 与 q 不重叠:
if x.left != nil 且 x.left.max >= q.low:
x = x.left
else:
x = x.right
return x向右的理由最直观:若 left.max < q.low,左子树中每个区间的右端点都在查询左端点之前,因此左侧绝不可能重叠。
向左看似只知道“左侧可能重叠”,为什么可以舍弃右侧?设左子树中达到 left.max 的区间为 。若左侧最终没有任何重叠,而 i'.high >= q.low,那么不重叠只能说明 。右子树所有区间的左端点又不小于 ,所以它们也都在 的右边。也就是说,若左侧选择失败,右侧同样不可能成功。搜索因此能安全地只沿一条路径下降,最坏时间为 。
交互演示:观察 max 如何排除整棵子树
拖动查询区间。演示会按区间树的决策顺序寻找任意一个重叠项,并解释每次向左或向右的理由。
小测
13
对闭区间而言,[2,5] 与 [5,8] 不重叠,因为它们只有端点相同。
14
区间树当前节点不重叠查询 q,且 left.max < q.low。下一步为什么可以安全向右?
B 树把一个节点扩展成一页
红黑树把一次比较对应到一个二叉节点。若数据远大于内存,真正昂贵的常常是把一个存储页读入内存,而不是页内做几十或几百次比较。B 树让一个节点容纳许多有序键和孩子指针,使一次页读取完成一次多路分支,显著缩短根到叶的页数。
分析 B 树时应分开两种成本:
- 页访问次数:读写了多少个外存页,主要由树高决定。
- CPU 时间:在页内移动、比较了多少个键,受节点容量和页内搜索方式影响。
节点通常按页大小设计。根可以长期保留在内存;访问下一层前读取相应孩子页,修改节点后再写回。即使底层介质不含机械部件,“成块传输比逐条随机读取更合算”的页级模型仍适用于数据库索引和文件系统。
最小度数定义容量边界
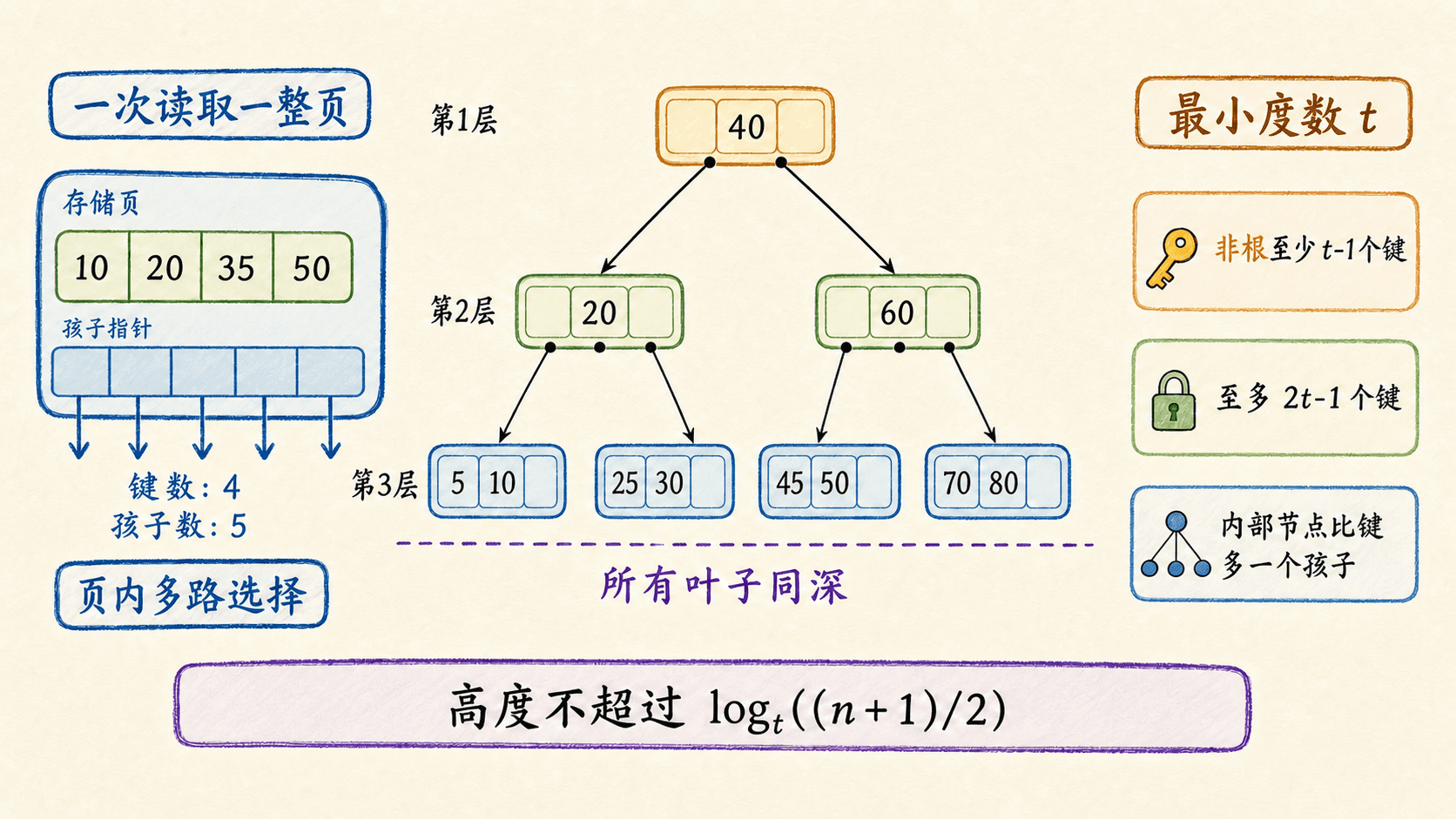
设 B 树的最小度数为整数 。节点 有 个非降序键;内部节点有 个孩子。第 个键把第 与第 棵子树的键域分开。
合法 B 树还满足:
- 所有叶子位于同一深度。
- 除根外,每个节点至少有 个键;内部节点至少有 个孩子。
- 每个节点至多有 个键、 个孩子;达到上限称为满节点。
- 非空根至少有一个键;根若不是叶子,至少有两个孩子。
当 时,每个非根节点有 1..3 个键,内部节点有 2..4 个孩子,这就是常说的 2-3-4 树。
高度上界来自最低装载率
高度为 的最稀疏非空 B 树,根有一个键和两个孩子;深度 有至少两个节点,此后每层节点数至少再乘 。除根外每个节点至少有 个键,因此
于是
分支因子越大,对数的底越大,树越矮。这正是 B 树减少页访问的核心。
小测
15
最小度数 t=3 的非根 B 树节点,哪些键数量是合法的?
16
最小度数为 t 的满 B 树节点含有 ____ 个键。
B 树搜索与插入坚持单向下行
B 树搜索在节点内找到最小下标 ,使得 ;若相等就返回当前位置。若不等且 是叶子,搜索失败;否则读取第 个孩子并继续。访问节点形成一条根到叶路径,因此页读取次数为
若在每个节点中线性扫描至多 个键,CPU 时间为 ;若页内用二分查找,每层比较 次,总比较数可写成 。
分裂满节点
满孩子 有 个键。分裂时,把中位键 提升到非满父节点;左半仍由 保存前 个键,新节点 保存后 个键。若 不是叶子,它的前 个孩子留在 ,后 个孩子转给 。父节点多一个键和一个孩子。
分裂本身在页内搬移 个键或指针,只需常数次页写入。若根已满,先创建空的新根,把旧根设为它的孩子,再分裂旧根。B 树只在根分裂时增高,而且是在顶部增高。
为什么要“下去之前先分裂”
朴素插入先走到满叶子,才发现没有位置,只能回到父节点;若父节点也满,还要继续回溯。自顶向下插入采用更强的不变式:绝不下降到满节点。
每次准备进入孩子前,先检查孩子是否满。若满,立即分裂,再根据待插键与刚提升的中位键比较,选择左半或右半继续。到达叶子时,它一定非满,直接把键插入有序位置。这样一次插入只向下走一遍。
text
B-TREE-INSERT(T, k)
若根已满:
创建空的新根 s
s.child[0] = 旧根
分裂 s 的第 0 个孩子
INSERT-NONFULL(T.root, k)
INSERT-NONFULL(x, k)
若 x 是叶子:把 k 插到有序位置并写回
否则:
找到目标孩子 i 并读取它
若 child[i] 已满:
分裂 child[i]
重新比较 k 与提升到 x 的中位键
下降到确定的非满孩子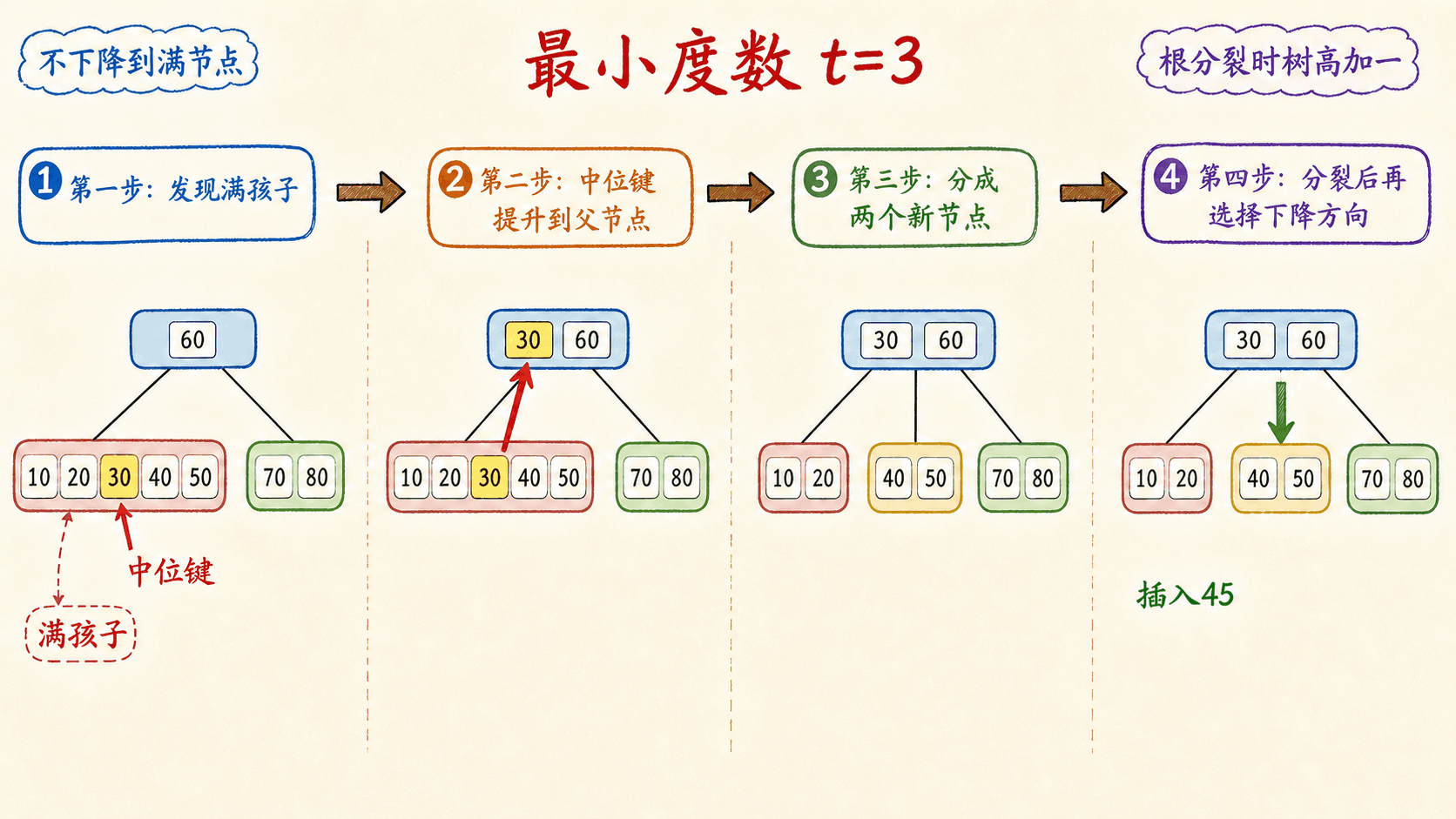
交互演示:最小度数为 2 的分裂
依次插入键,观察满根如何在下降前分裂。演示只展示结构变化,所有节点都遵守 1..3 个键的容量边界。
插入访问 个页,CPU 时间为 。尾递归版本可以改写为循环,使任一时刻只需在内存中保留常数个相关页。
小测
17
自顶向下 B 树插入准备进入一个满孩子时,正确动作是什么?
18
B 树与普通二叉搜索树一样,只能在最底部增加树高。
B 树删除在下降前避免孩子下溢
B 树删除比插入多一个难点:键可能位于内部节点,而且下降后不能让非根节点少于 个键。为实现单向下行,递归入口采用比合法性更强的条件:每次递归进入节点 时, 至少有 个键。 这样即使在子树中删掉一个键,节点仍至少保留 个键。
待删键就在当前节点
若当前节点是叶子,直接移除键并紧缩数组。
若当前节点是内部节点,设待删键 左右相邻孩子为 和 :
- 若 至少有 个键,用 的前驱 替换 ,再递归删除 中的 。
前驱是左子树最右侧的键,后继是右子树最左侧的键。内部键替换可能需要在返回时写回当前页,这是删除中少数需要回到上层完成赋值的地方;查找路径仍只有一条。
待删键不在当前节点
先确定可能包含 的孩子 。若 已有至少 个键,可直接下降。若它只有 个键,下降前必须补强:
- 若某个相邻兄弟至少有 个键,就向兄弟借一个。父节点的分隔键下移到 ,兄弟靠近 的键上移到父节点;若是内部节点,还要把相应孩子指针一起转移。
- 若相邻兄弟也只有 个键,就把 、父节点的一个分隔键和一个兄弟合并,再下降到合并节点。
借键是三方轮转,不是把兄弟键直接塞进孩子。少了“父键下移、兄弟键上移”这一步,父节点的分隔范围会失真。
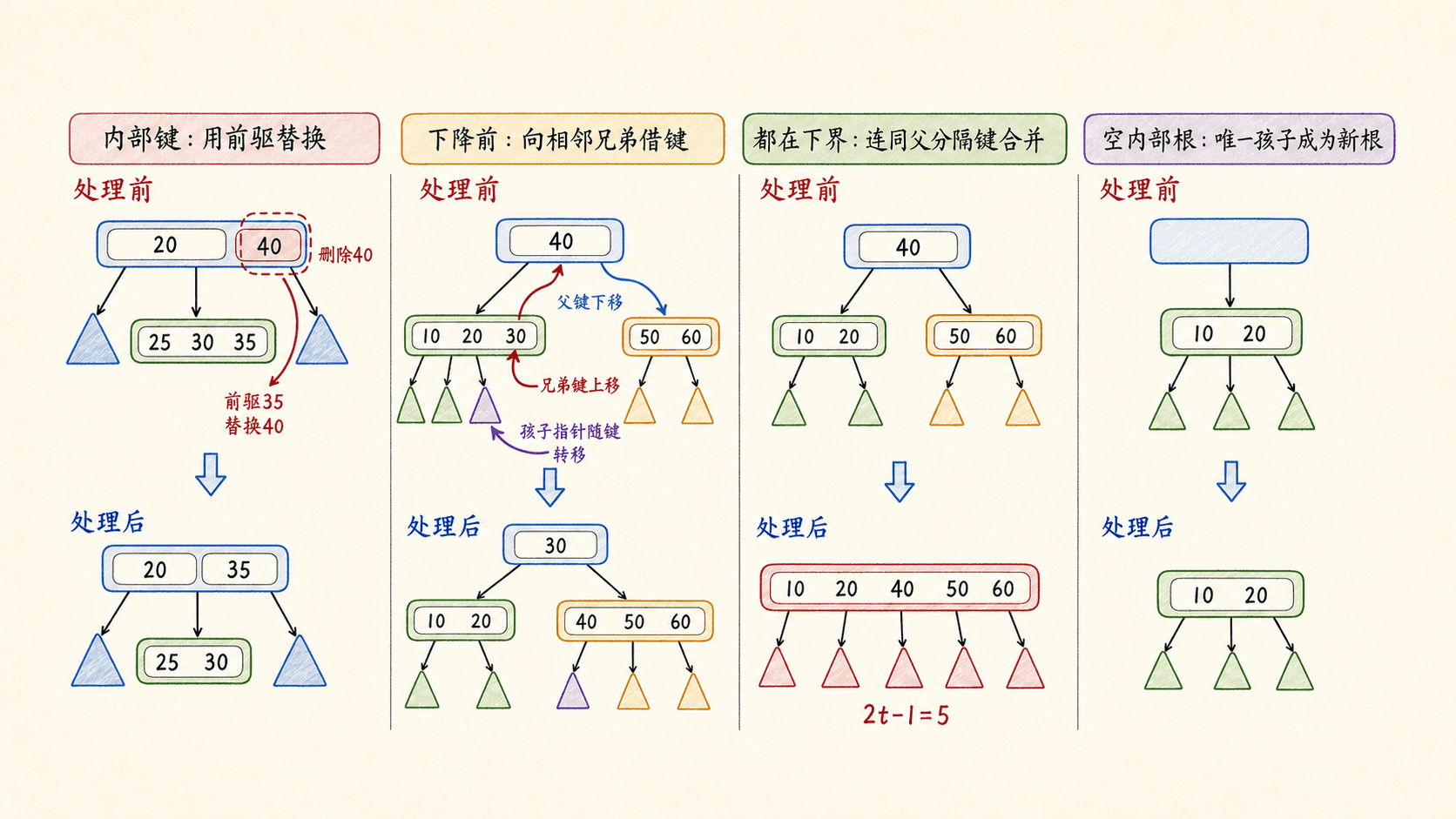
根是唯一允许例外的节点
合并可能让内部根失去最后一个键。此时根只剩一个孩子,就删除空根,让唯一孩子成为新根,树高减一。空树根可以是没有键的叶子。除根以外,任何节点都不能通过“临时少一个键,稍后再修”来逃避容量下界。
删除每下降一层只做常数次页读写,所以页访问是 ;页内移动至多 个键或指针,CPU 时间为 。
小测
19
准备递归进入一个只有 t-1 个键的 B 树孩子时,哪些操作可能使它先达到至少 t 个键?
20
B 树内部根在合并后变成 0 个键且只剩一个孩子,应如何处理?
选型时先看瓶颈,再看不变式成本
这些树没有一个在所有场景中都最好。它们解决的是不同的瓶颈。
实现完成后,不要只测“能不能搜到”。更有效的测试是为不变式写检查器:BST 检查上下界;AVL 自底向上核对高度与平衡因子;红黑树检查根、红红相邻和每条路径黑高;增强树重算摘要并对比;B 树检查键数量边界、分隔范围、孩子数以及所有叶子深度。
随机插入删除能覆盖大量形状,但还应专门构造边界序列:单调键、反复删除根、红黑删除的四类兄弟颜色、B 树连续根分裂、向左右兄弟借键、合并后根收缩。复杂树的错误通常不是发生在“普通路径”,而是发生在一次指针重接后,某个看似无关的摘要、父指针或哨兵状态没有同步。
小测
21
只要随机测试中所有搜索结果正确,就可以证明红黑树的颜色与黑高不变式始终正确。
22
下列场景与结构的搭配,哪些是合理的?