堆:用局部有序换取稳定的优先级操作
如果任务总在问“当前最大的是谁”或“下一件最紧急的事是什么”,每次把全部元素重新排序就显得太重了。堆提供了一种更克制的方案:它不维护完整顺序,只保证父节点与子节点之间的大小关系。正是这点局部有序,让我们能在常数时间查看极值,并在对数时间内插入、删除或修改优先级。
本文统一讨论数组存储的二叉堆,代码采用 0-based 下标。最大堆是主线,最小堆只需反转比较方向。你会看到三个容易混淆却必须分开的对象:数组的实际长度、当前有效堆的大小,以及排序后已经退出堆的有序后缀。
堆究竟保证了什么
二叉堆同时受“形状”和“次序”两类约束。少了其中任何一个,后面的下标公式或复杂度结论都不再成立。
形状约束:完全二叉树
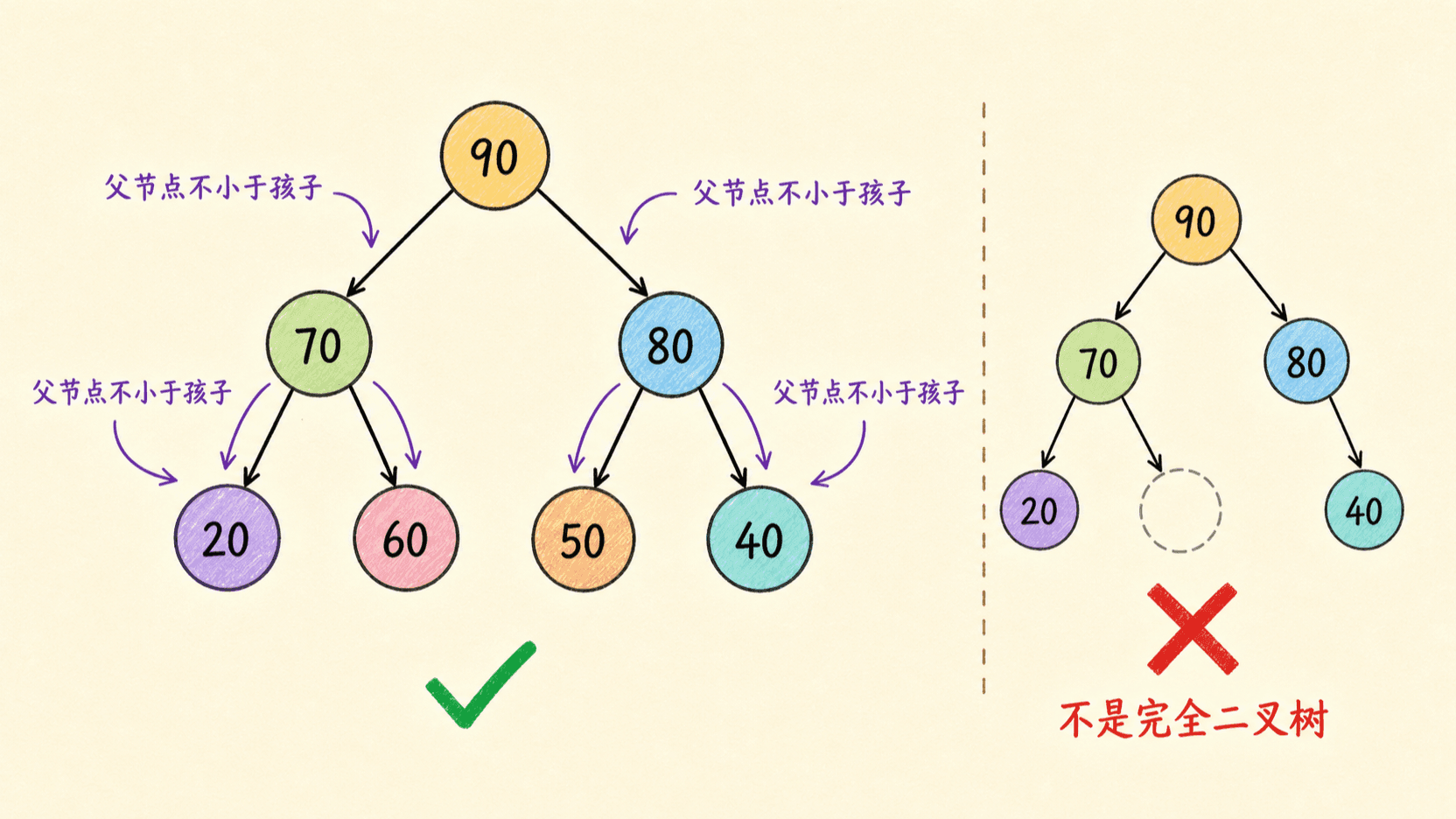
完全二叉树的每一层都从左到右填充。除最后一层外,其余层全部填满;最后一层可以不满,但节点不能在中间留下空洞。于是,按层次顺序保存节点时,数组一定是一段连续区间,不需要为空孩子存哨兵。
若非空堆有 个元素,它的高度是
这里的高度按“根到最深叶子的边数”计算。反过来,高度为 的堆至少有 个节点,至多有 个节点。堆操作沿一条根到叶或叶到根的路径移动,因此路径长度至多是 ,也就是 。
次序约束:只比较父子
最大堆要求每个非根节点的键都不大于父节点:
沿祖先链反复使用这个关系,可以得到:任意子树的根都是该子树中的最大元素,整棵树的根就是全局最大元素。最小堆把不等号反过来,因此根是全局最小元素。
堆没有规定兄弟之间谁大,也没有规定左子树中的元素一定小于右子树中的元素。数组 [100, 60, 90, 20, 50, 80, 70] 是最大堆,但它既不是升序数组,也不是降序数组。
若最大堆中的键互不相同,最小元素一定在叶子上。假如最小元素位于非叶节点,它至少有一个更小的孩子,这与“它已经是最小元素”矛盾。它不一定在数组最后一格,但不能出现在任意内部节点。
堆和“内存堆”不是一回事
这里的堆是一种维护优先级的数据结构。程序运行时用于动态分配对象的内存区域有时也叫“堆”,两者只共享名称,不共享结构和操作。二叉堆通常就是一个连续数组,并不要求每个节点单独动态分配。
小测
1
一个含 13 个元素的非空二叉堆,高度是多少?高度按边数计算。
2
关于最大堆,下列哪些结论必然成立?
树与数组如何一一对应
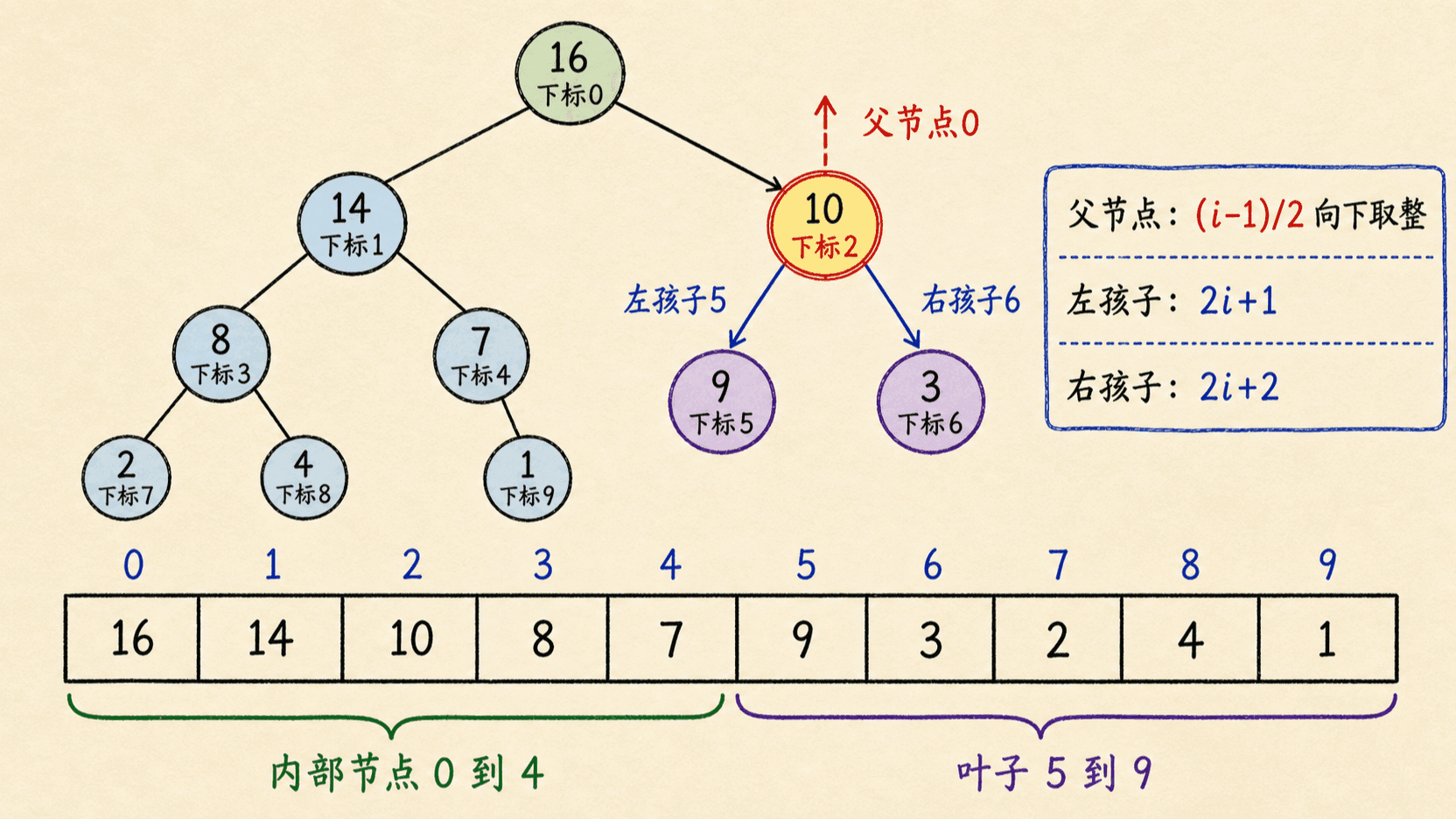
完全二叉树紧凑地填满层次顺序,因此数组下标本身就能表达父子关系。本文统一使用 0-based 下标。对合法节点 :
根节点 没有父节点,不能把 parent(0) 当作合法查询。孩子公式算出的下标若不小于 heapSize,对应孩子就不存在。
内部节点与叶子的边界
在长度为 的非空堆中,所有叶子恰好位于
若 ,最后一个内部节点是 。这两个边界直接决定自底向上建堆从哪里开始。以 为例,内部节点下标是 0..4,叶子是 5..9。
证明也很直接。节点 至少有左孩子的条件是
整数下标下,这等价于 ;不满足条件的下标便全部是叶子。
数组长度不等于有效堆大小
普通优先队列中,数组里的每个元素通常都属于堆,此时 heapSize == A.size()。堆排序却会把最大元素逐个放到数组尾部。这些元素仍在数组中,但已经退出堆,所以必须只在 [0, heapSize) 内比较孩子。
text
数组: [ 堆的有效区间 | 已排好序的后缀 ]
下标范围: [0, heapSize) [heapSize, A.size())把 A.size() 错当成 heapSize,下沉时会把已经排好序的元素重新交换回堆中,排序结果随即失效。
交互演示:点亮一个下标
拖动滑块,观察数组位置、树节点以及父子下标如何同步变化。
小测
3
0-based 数组堆有 18 个元素,最后一个内部节点的下标是 ____。
4
堆排序过程中,孩子下标是否有效应与数组 A 的总长度比较。
向下修复为何只走一条路径
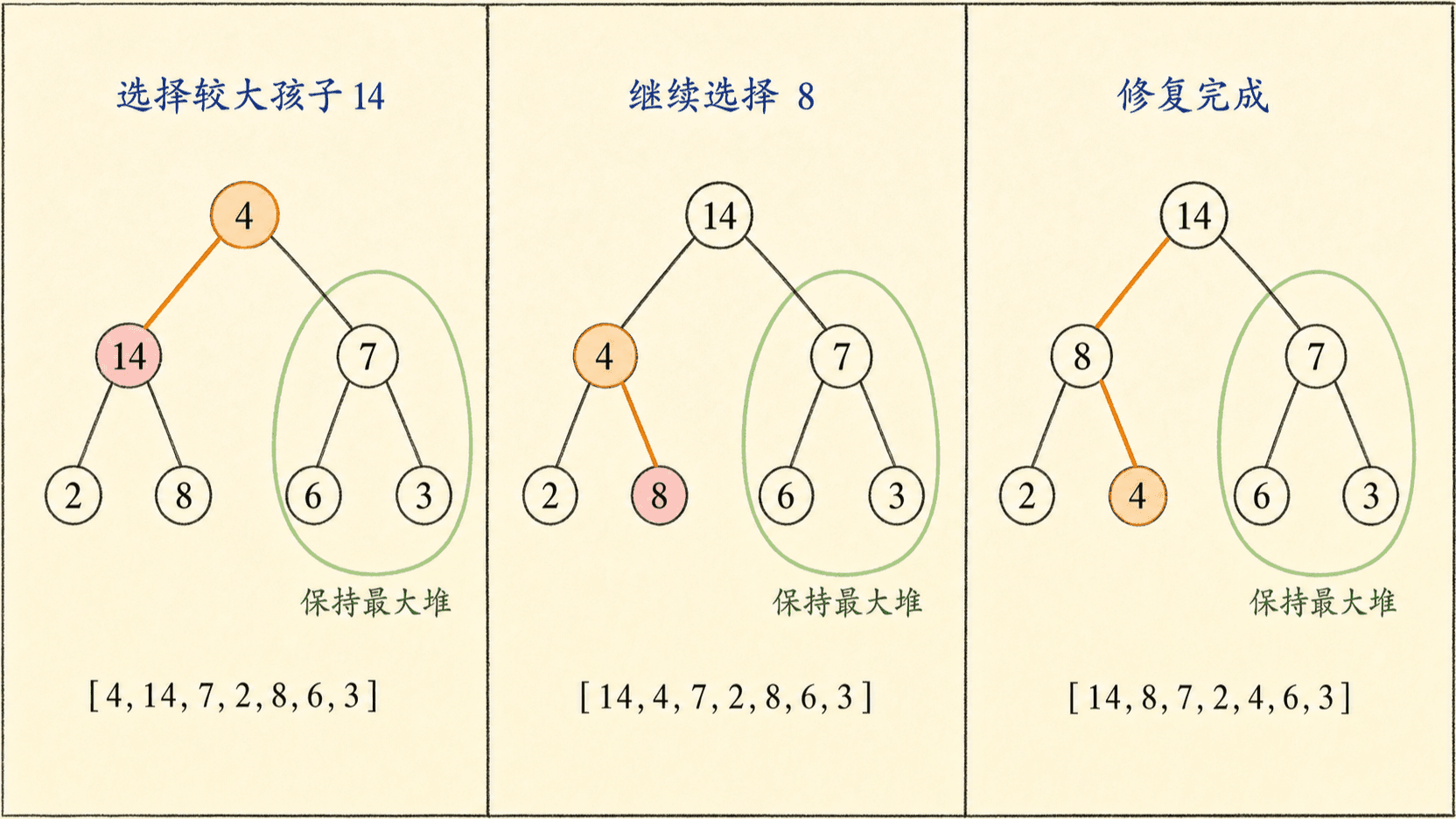
siftDown(也常称 maxHeapify)不是把任意乱序子树直接变成堆的万能函数。它有一个关键前提:待修复节点的左子树和右子树已经分别是最大堆,只有该节点与孩子之间可能违背堆序。
在这个前提下,我们比较“当前节点、左孩子、右孩子”三个候选者。如果当前节点最大,整棵子树已经合法;否则与较大的孩子交换。交换后,原来较小的值只可能在刚进入的那棵子树中继续违例,另一棵子树完全不受影响,因此算法只需沿一条路径向下。
可直接复用的迭代实现
cpp
#include <algorithm>
#include <cstddef>
#include <vector>
void siftDown(std::vector<int>& a, std::size_t i, std::size_t heapSize) {
while (true) {
const std::size_t left = 2 * i + 1
heapSize 采用半开区间语义:有效堆是 a[0..heapSize)。调用者要保证 i < heapSize <= a.size()。空堆不应调用本函数;单元素堆调用时会立即返回。
正确性为什么成立
可以把循环不变式写成一句话:每轮开始时,除当前下标 i 可能小于某个孩子外,当前子树的其他父子关系均满足最大堆序。
- 初始化时,这正是函数的前置条件:两棵孩子子树已经是堆。
- 若当前值不小于较大的孩子,它也不小于另一个孩子,当前节点和两棵孩子子树共同构成最大堆。
- 若当前值与较大孩子交换,新根拿到三者最大值,根部恢复合法;原值进入
largest的位置,唯一可能的违例随下标一起下移,不变式得以保持。 - 每次交换至少下降一层。到达叶子或不再需要交换时,违例消失,函数终止。
对高度为 的节点,最坏只下沉 层,所以时间是 ,在整堆根部调用时是 。若按子树规模写递推,较大孩子子树最多约占原子树的 :
存在让待修复值一路沉到叶子的输入,因此根部修复的最坏时间也是 ,合起来为 。
必须与“较大的孩子”交换。若只看左孩子,或遇到一个更大的孩子就立刻交换,可能把更大的右孩子留在父节点下面,根部仍然违反最大堆序。
交互演示:一步一步下沉
下面的初始数组只有下标 1 的节点可能违例,它的两棵孩子子树已经是最大堆。每点一次“执行一步”,演示就完成一轮比较和交换。
小测
5
对最大堆执行向下修复时,当前节点同时小于左右孩子,应该与谁交换?
6
只要给出任意数组和任意下标,调用一次 siftDown 就能把整段数组变成最大堆。
自底向上建堆为什么是线性时间
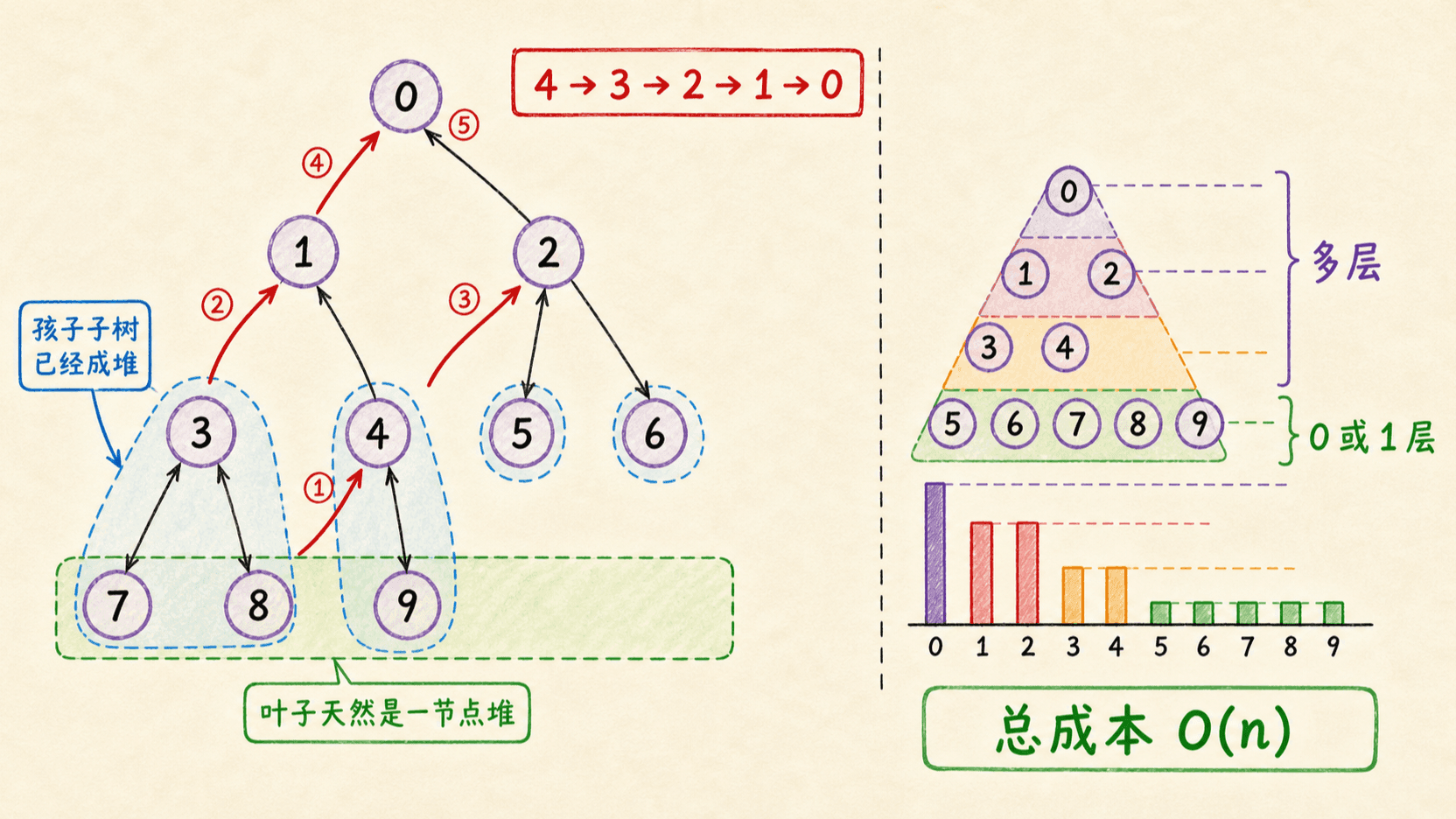
给定一个无序数组,最自然的想法是从空堆开始逐个插入。这样当然正确,但第 次插入可能上浮 层,总成本最坏为 。自底向上建堆直接利用了数组里已经存在的完全二叉树形状,把叶子视为天然合法的一节点堆,再逐层修复内部节点。
cpp
void buildMaxHeap(std::vector<int>& a) {
// parentCount - 1 依次取 floor(n/2)-1, ..., 1, 0。
// 循环变量始终大于 0 时才做减法,避免无符号下溢。
for (std::size_t parentCount = a.size() / 2;
parentCount > 0;
--parentCount) {
siftDown(a, parentCount - 1, a.size());
}
当数组为空或只有一个元素时,a.size()/2 是 0,循环不会进入,结果自然正确。对 ,第一次传给 siftDown 的下标正是最后一个内部节点 。
循环不变式给出完整正确性证明
在每轮处理下标 i 之前,保持下面的不变式:
下标
i+1到n-1的每个节点,都是一棵最大堆的根。
初始化时,i = floor(n/2)-1。比它大的下标从 floor(n/2) 开始,全部是叶子;单个叶子没有需要检查的父子边,因此每个叶子都是最大堆的根。
处理 i 时,它的孩子下标都大于 i。由不变式可知,两棵孩子子树已经是最大堆,恰好满足 siftDown 的前置条件。修复后,节点 i 也成为最大堆的根,而后面的子树仍保持合法。
当下标 0 处理完毕时,根节点是最大堆的根,所以整个数组都满足最大堆序。完全二叉树形状始终由数组长度保证,不需要额外修复。
不能用“调用次数乘堆高”估出紧确结果
建堆确实调用约 次 siftDown,单次上界也确实是 ,所以 是一个正确但宽松的上界。问题在于,大多数节点靠近树底,根本没有那么高的下沉路径。
设堆高为 。深度为 的节点不超过 个,每个这样的节点最多下沉 层。总下沉层数至多为
令 ,得到
又因为 ,总工作量是 。直观上,能下沉很多层的节点非常少;数量庞大的底层节点只能下沉零层或一层。
线性建堆和逐个插入可能得到不同的合法堆。堆并没有唯一形态;只要完全二叉树形状和父子堆序成立,结果就是正确的。
小测
7
自底向上构建含 n 个元素的最大堆,最坏时间复杂度是多少?
8
自底向上建堆必须从最后一个内部节点向根倒序处理,原因有哪些?
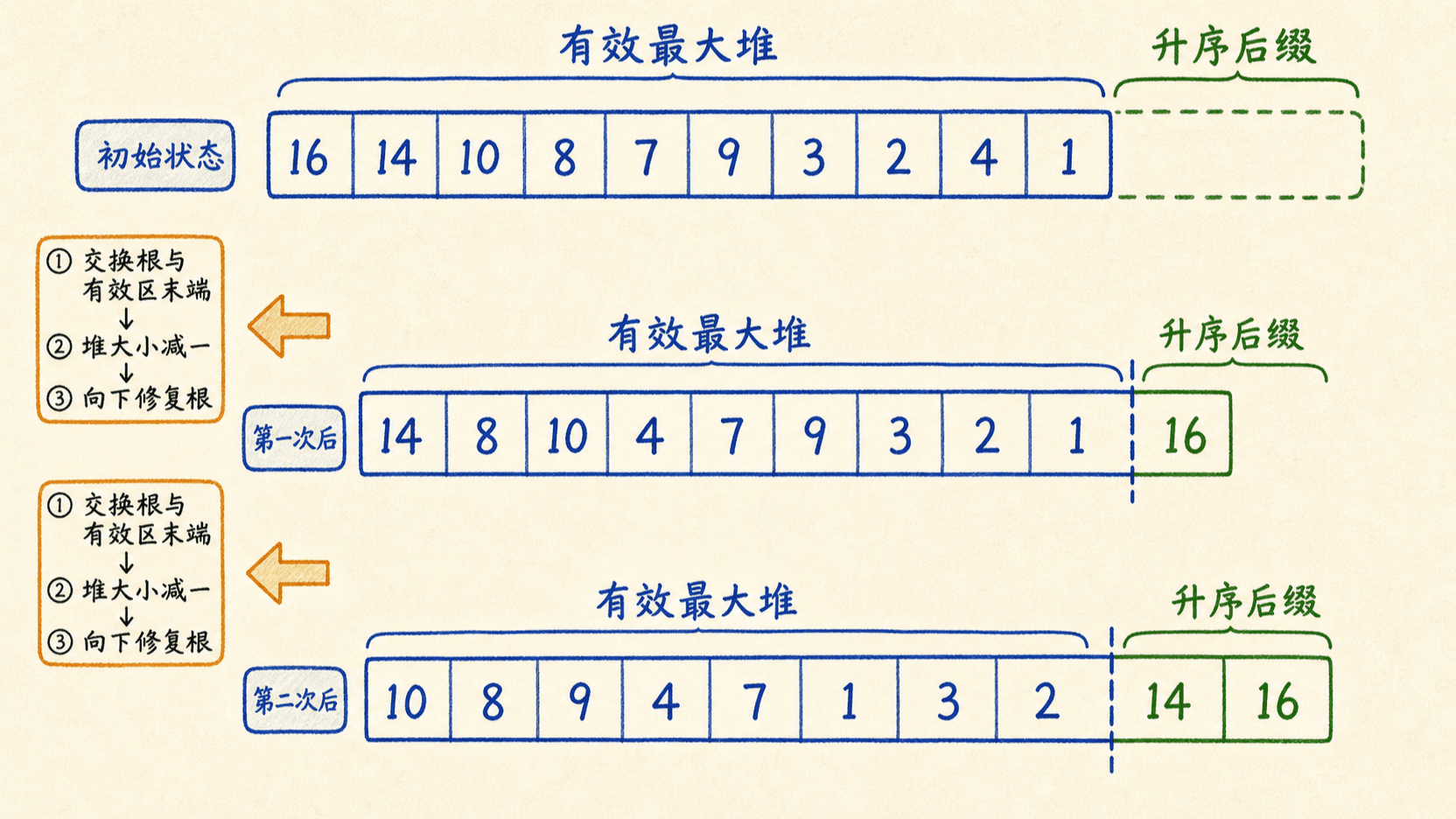
堆排序如何维护两段边界
最大堆把当前最大值放在根。若把根与有效堆的最后一个元素交换,最大值就到了最终位置。接着把有效堆大小减一,并对新根向下修复,便能重复取出下一个最大值。数组由此逐渐分成左侧最大堆和右侧升序后缀。
cpp
void heapSort(std::vector<int>& a) {
buildMaxHeap(a);
for (std::size_t end = a.size(); end > 1; --end) {
std::swap(a[0], a[end - 1]);
siftDown(a, 0, end - 1
代码把 end 定义为有效区间的右开边界。每轮开始时,有效堆是 [0, end);交换后,新后缀从 end-1 开始,所以传给 siftDown 的新 heapSize 是 end-1。
排序循环的不变式
每轮开始时保持三件事:
a[0..end)是最大堆;a[end..n)已按升序排列;- 堆中的每个元素都不大于后缀中的每个元素。
初始化时,建堆让第一条成立,后缀为空,后两条自然成立。维护阶段把堆中最大值放到 end-1,它不大于原有后缀的第一个元素,因此扩展后的后缀继续升序;缩小后的堆只有根部可能违例,向下修复后第一条恢复。循环结束时 end=1,单元素前缀和有序后缀合起来就是完整升序数组。
复杂度、空间与稳定性
建堆是 ,随后执行 次至多 的向下修复:
使用迭代 siftDown 时,算法只需常数个临时变量,辅助空间是 。如果改成递归下沉,调用栈会占 空间。
堆排序通常不稳定。根与远端元素交换、下沉时跨层交换,都可能改变相等键记录的原始相对次序。它也不是自适应排序:即使输入已经升序或降序,标准实现仍要建堆并执行相同数量的取出轮次,渐近时间仍是 。
交互演示:观察边界向左移动
点击按钮后,每一步会把当前最大值放进右侧绿色有序区,并恢复左侧最大堆。
小测
9
使用最大堆进行原地升序排序时,每轮应把根与有效堆的最后一个元素交换。
10
关于标准堆排序,下列哪些描述正确?
优先队列把堆变成可用接口
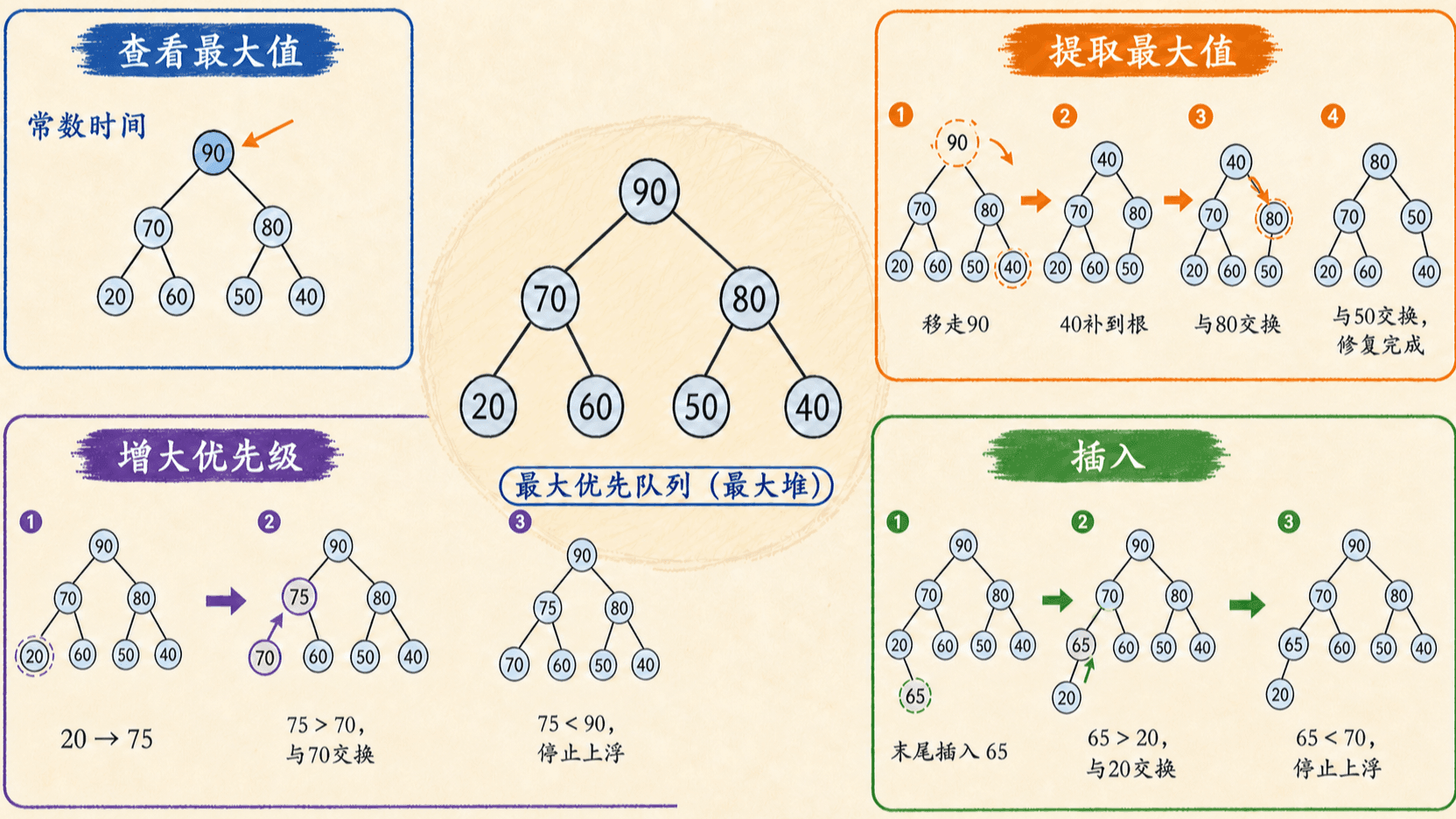
优先队列维护一组带“键”的元素。键表示优先级,元素还可以携带任务、事件或记录本身。最大优先队列至少支持四个核心操作:
最大值就在根,所以查看只需一次数组访问。删除根后,为维持完全二叉树形状,不能随便拿某个孩子补位;应把数组最后一个元素移到根,缩短数组,再向下修复。增大键只可能破坏它与父节点的关系,因此沿祖先链上浮。插入先把元素追加为最右叶子,再执行同样的上浮过程。
一份包含边界检查的实现
cpp
#include <algorithm>
#include <cstddef>
#include <stdexcept>
#include <vector>
class MaxPriorityQueue {
private:
std::vector<int> heap_;
void siftUp(std::size_t i) {
while (i > 0) {
const std::size_t parent = (i - 1) /
extractMax() 单独处理单元素堆,避免弹出后再访问 heap_[0]。increaseKey() 先检查方向;若允许把键减小,就应改走向下修复。把两个方向混在一个接口中也可以:修改后与父节点比较,变大且超过父亲就上浮,否则向下修复。
上浮循环的不变式
增键后,唯一可能的违例是当前节点比父节点大。它与自己的孩子仍然合法,因为键只变大了。每次与父节点交换后,较大的新键上移;原父节点下移到孩子位置时,仍不小于该位置原来的其他孩子。于是唯一违例继续跟着新键向根移动,直到父节点不小于它或它成为根。
元素不只有一个数字时,要维护句柄
真实任务通常保存 (priority, payload, id)。若外部通过 id 调整优先级,需要额外维护 id -> 数组下标 的映射。每一次交换堆元素,都必须同步更新两个元素的下标映射,否则下一次 increaseKey 会改错对象。
二叉堆擅长找极值,却不擅长按任意键搜索。没有句柄时,为了找到某个指定任务,最坏仍要扫描 个元素;找到以后上浮或下沉才是 。
常见用法包括:最大优先队列安排最高优先级任务;最小优先队列按时间提取下一场事件;图算法用最小优先队列反复取当前距离最小的顶点并降低候选距离;合并 个有序序列时,用大小至多为 的最小堆保存各序列当前首项,总时间可达 。
小测
11
最大优先队列删除根后,为同时保持完全二叉树形状,应先把哪个元素移到根?
12
优先队列元素带稳定 id,外部可按 id 修改优先级。实现时哪些做法正确?
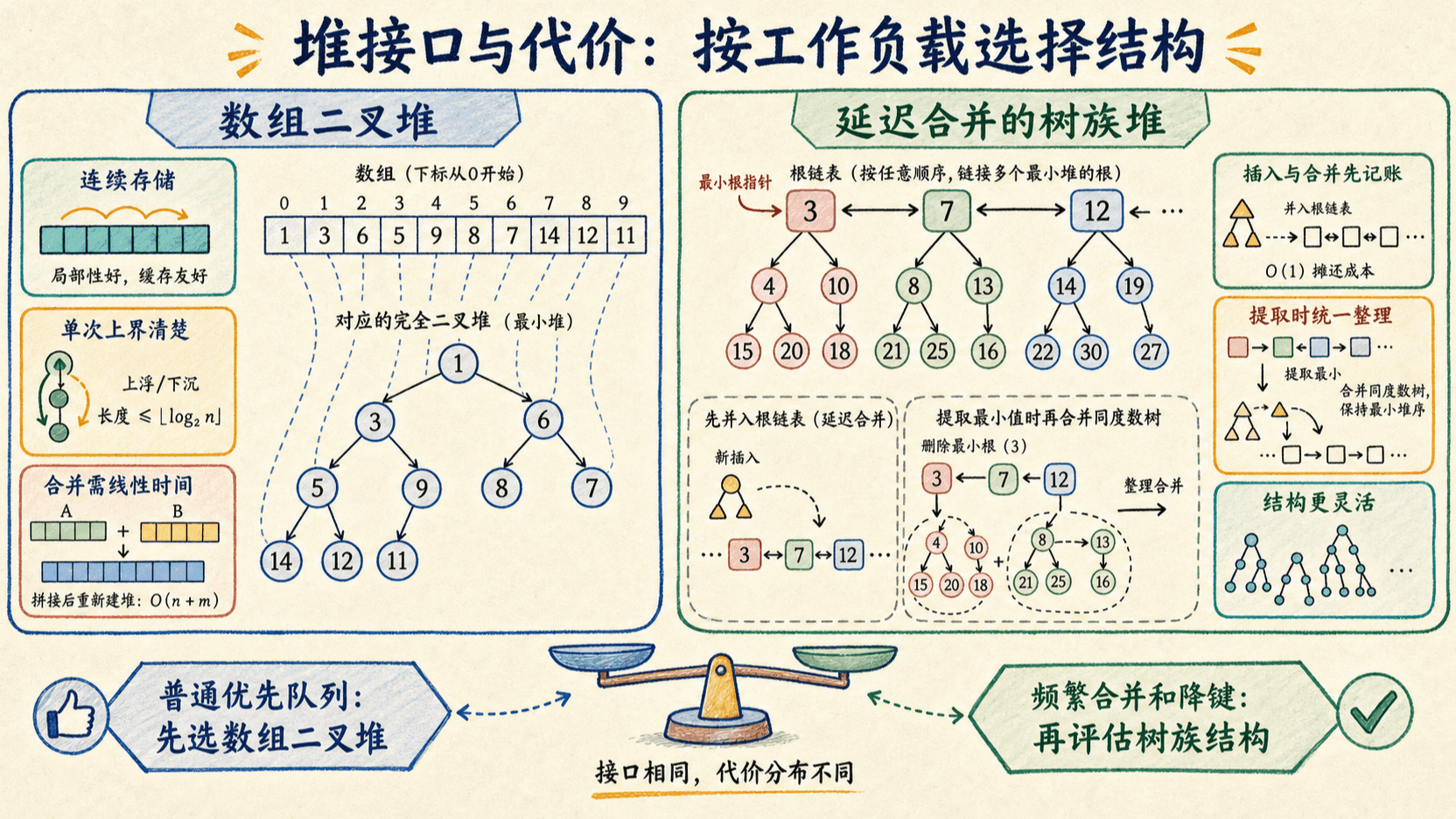
接口与代价要一起选择
“堆”描述的是一类接口和次序约束,不等于只有一种内部结构。数组二叉堆结构简单,每次关键修改都有清楚的最坏上界。若工作负载极度偏向合并、插入和降低键,还可以考虑把多个最小堆有序树保留在一个根链表中,并把整理工作推迟到提取最小值时完成。
下面用最小堆接口作同向比较;最大堆只需反转大小关系。
这里的“延迟合并的树族堆”通常称为 Fibonacci 堆。它把每棵树维持为最小堆有序,根节点放进可常数时间拼接的循环双向链表,并保存最小根指针。插入只是增加一棵单节点树,合并只是拼接根链表;提取最小值时才把同度数的树逐步链接起来。降低键若破坏父子关系,会切断节点并在必要时级联切断祖先。
摊还常数不等于每次常数
摊还分析讨论一串操作的总成本。某次操作可以很贵,只要此前便宜操作积累的“余额”足以支付它,平均到整串操作后仍可能是常数。
树族堆可用势能直观表达这种余额。若 是根链表中的树数, 是被标记的节点数,可取
插入会增加一棵树,实际工作与势能增量都为常数。提取最小值虽然可能扫描并链接许多根,但每次链接都会减少树数,也就是释放此前积累的势能。降低键造成的级联切断可能单次很长,不过切断被标记节点会清除标记,势能下降可以支付这些步骤。因此“插入摊还 ”不能解释成“任意一次操作的最坏时间都是常数”。
为了让提取最小值的摊还时间保持 ,还需要保证节点最大度数为 。级联切断的规则使一个度数为 的节点必须拥有至少按 Fibonacci 数增长的子树规模,因而其子树大小至少呈指数增长:
其中 。因为 size(x) <= n,所以
这个比较只是在回答“换一种内部结构能否改变某些接口的代价”。日常优先队列若不频繁合并,也没有海量降低键操作,数组二叉堆通常更直接:常数因子小、连续内存友好、代码和边界更容易验证。树族结构适合对摊还界有明确需求的工作负载,代价是更多指针、标记和复杂维护逻辑。
最后的实现检查单
- 先固定最大堆或最小堆,并让所有比较方向一致。
- 明确使用 0-based 还是 1-based 下标,不要混用公式。
- 所有孩子判断都与有效
heapSize比较。 - 向下修复前确认两个孩子子树已经成堆。
- 自底向上建堆从最后一个内部节点倒序到根。
- 空堆、单元素堆、重复键和下标越界都要单独验证。
- 元素交换时同步维护外部句柄;复杂度表要注明最坏、期望还是摊还。
小测
13
某种堆的插入操作为摊还 O(1),意味着每一次插入的最坏时间都必须是 O(1)。
14
工作负载不需要合并堆,规模中等,并且更看重实现简单、连续内存和清晰的单次最坏上界,通常先选择哪种结构?