内存与性能优化:从成本模型到页面 I/O
“更省内存”和“运行更快”不是同一件事。一个表示可能减少空槽,却增加一次查询要追踪的链接;一个操作可能偶尔复制整张表,却让很长一串操作的平均成本保持稳定;一棵树在主存里比较次数不多,放到外存后仍可能因为读取页面太多而变慢。
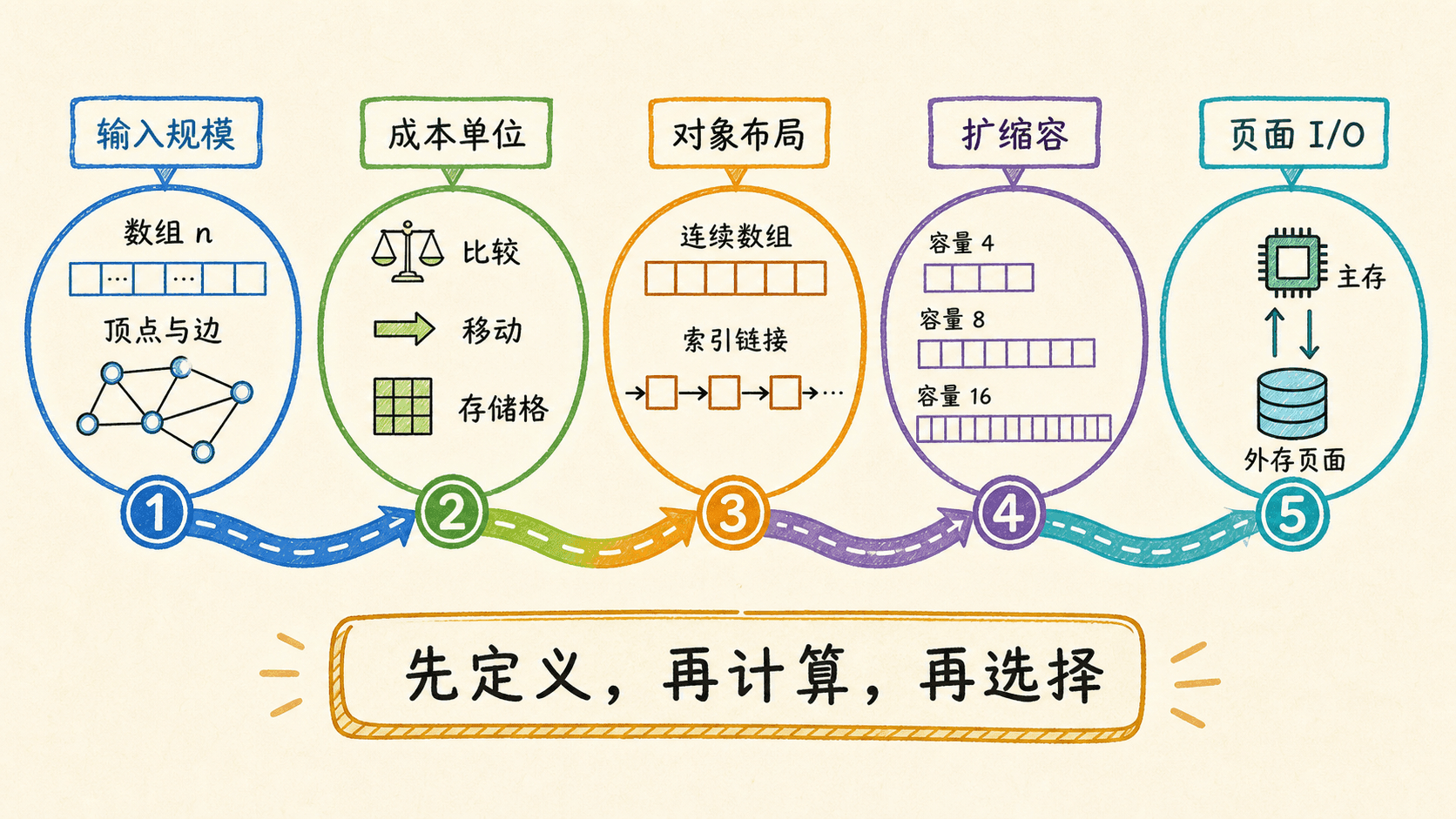
所以,优化不能从某个固定技巧出发。我们先明确输入规模与成本单位,再检查对象怎样落在数组和链接中,最后决定需要控制的是总步骤、辅助空间、空闲容量,还是页面读写次数。本文沿着这条线,把内存布局、表示选择、摊还分析、动态扩缩容和外存索引连成一套可复用的判断方法。
先把“快”和“省”变成可计算的问题
算法分析预测的是资源消耗。运行时间最常见,但内存、通信带宽和外部存储读写也可能才是主要约束。分析之前必须先回答两个问题:输入有多大,以及一次成本按什么计数。
输入规模不一定只有一个数字
排序时,数组元素个数 通常就是自然的输入规模。大整数运算更适合用输入的总位数衡量,因为“一个整数”可能短到能放进一个机器字,也可能长到需要许多字。图则常用两个参数:顶点数 与边数 。若只写“图规模为 ”,稀疏图与稠密图的空间差异就会被藏起来。
输入规模的定义还约束了机器字。处理 个可索引元素时,可以假设一个机器字有 位,其中 是常数。这样,一个字足以保存数组下标,同时不会因为字长随输入任意增长而把巨量数据塞进“一次常数时间操作”。
RAM 模型适合做第一层分析
在顺序执行的 RAM 模型中,常见算术、装载、存储、复制、分支、调用与返回都按常数成本处理。这个抽象让我们能数“执行了多少个基本步骤”,而不用绑定某款处理器。
它也有边界:不能假设存在“一条指令完成排序”这种不现实操作;一般的幂运算也不能随意算作常数时间。更关键的是,RAM 模型不描述缓存与虚拟内存层次。因此, 说明增长率,却不承诺两段 代码在具体机器上耗时相同。
RAM 模型中的“一次访问”是分析单位,不是固定的纳秒数。若数据位于外部存储,或者布局会改变页面读写次数,就应另外建立 I/O 成本模型,不能给 RAM 步骤硬套硬件延迟。
时间成本与空间成本要分开计数
若第 行伪代码每次成本为常数 ,执行 次,那么总时间可以写成
随后再保留决定增长率的主导项。空间不能机械照搬这个乘法:一条语句每次访问 个字,执行 次,不代表它使用了 个不同的字。同一缓冲区可能被重复访问。分析空间时要数同时存活的独立存储单元,并区分输入本身、数据结构容量和算法额外申请的辅助空间。
可以把一次性能分析写成这张清单:
小测
1
分析一个图算法时,哪组输入规模最能保留稀疏图与稠密图的差别?
2
一条语句每次访问 m 个字并执行 n 次,就一定需要 mn 个不同的字。
对象、索引与空闲槽如何落进数组
指针不是实现链接结构的唯一办法。只要数组下标可以唯一指向一个槽,我们就能用下标合成“指针”,再用数组保存对象字段。这种表示把抽象对象与实际存储位置分开,也让内存预算变得可见。
多数组表示:同一下标拼成一个对象
假设双向链表节点有 key、next 和 prev 三个字段。可以为每个字段分别建数组:
text
key = [·, 4, 1, ·, 16, ·, 9, ·]
next = [·, 3, ·, ·, 2, ·, 5, ·]
prev = [·, 5, 2, ·, 7, ·, ·, ·]对同一个下标 ,key[x]、next[x]、prev[x] 合起来表示一个对象。next[x]=y 的含义是“下一个对象位于第 槽”,而不是数组中紧邻的第 槽。链表头也只需保存一个下标;再选一个不可能成为合法下标的值表示空指针。
这种布局适合同构对象:所有节点字段相同,各字段数组长度相同。若某个过程只扫描键,可以只访问 key;若要跟随链表,则读取 next 给出的索引。这里能严谨得到的结论是“扫描字段数组访问连续下标,跟随链接访问由索引序列决定”,至于具体缓存收益,仍要在目标机器上测量。
单数组表示:对象占据连续片段
另一种做法是在单个数组 中为每个对象分配连续片段。若每个对象占 3 个位置,起始下标 就是对象指针:
text
键值:A[p + 0]
后继:A[p + 1]
前驱:A[p + 2]字段偏移固定,读取字段就是“基址加偏移”。这种方式还能在同一个数组里放长度不同的对象,但异构对象的分配、回收与碎片管理会更复杂。数据结构由同构节点组成时,多数组表示通常更容易管理。
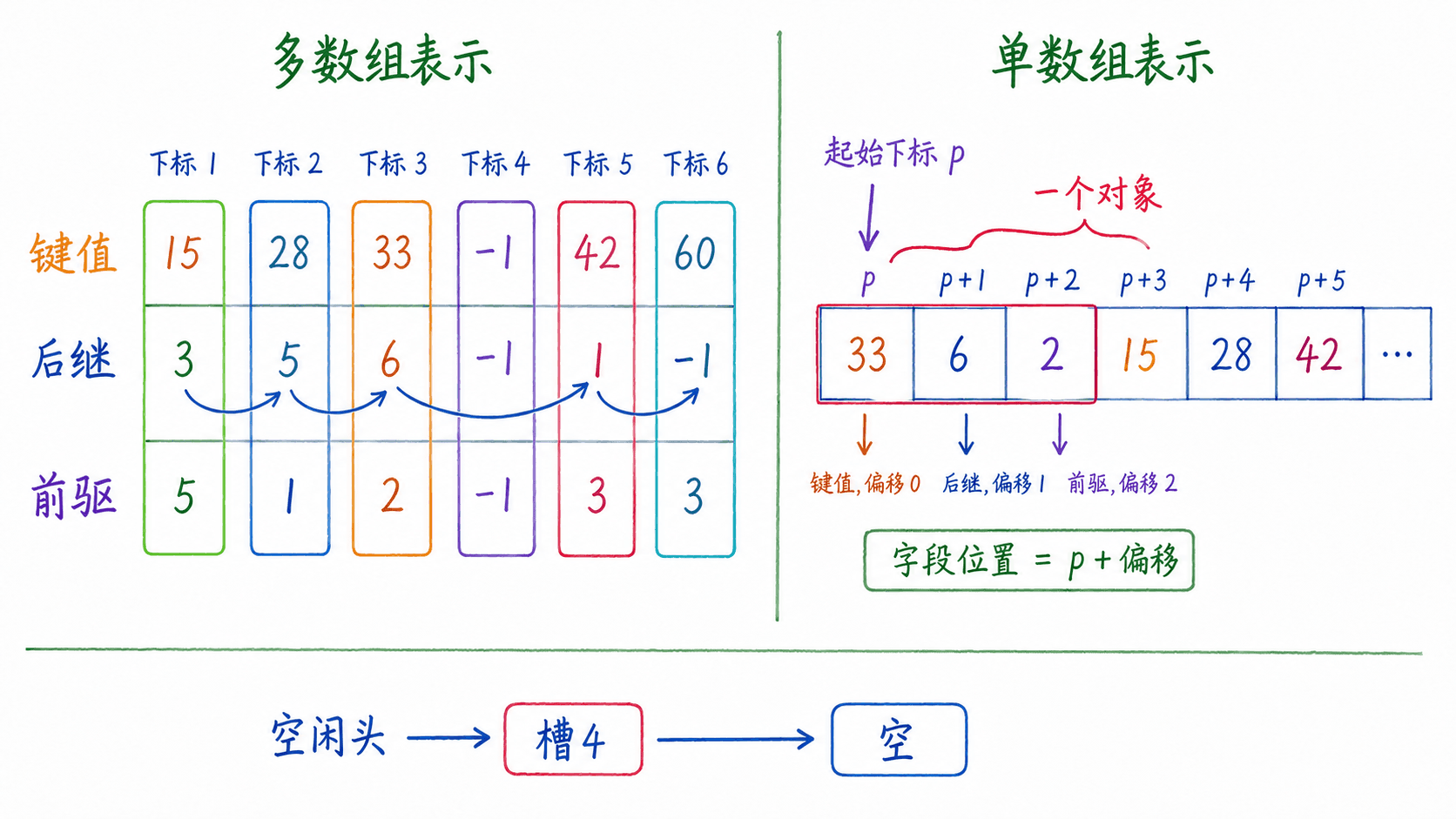
空闲链表让分配和回收保持常数成本
若数组容量为 、当前使用 个对象,则剩余 个槽可以串成单链表。全局变量 free 指向空闲链表头,空闲槽复用 next 字段记录下一空闲槽:
text
ALLOCATE-OBJECT()
若 free 为空:报告空间不足
x = free
free = next[x]
返回 x
FREE-OBJECT(x)
next[x] = free
free = x两个操作都只修改常数个下标,所以成本为 。一个槽在任意时刻只能属于活动结构或空闲链表,不能同时属于两者。分配后,调用者必须写入活动对象需要的字段;回收时则只需重建空闲链,因为空闲槽的其他字段暂时没有语义。
小测
3
关于多数组对象表示,下列哪些说法正确?
4
一个单数组对象从下标 p 开始,prev 字段偏移为 2,那么 prev 的位置是 ____。
表示选择决定访问路径与空间上界
抽象接口相同,底层表示仍可能不同。选择时至少同时看三件事:结构空间是多少、一次操作访问哪些位置、是否需要额外的指针或辅助数组。
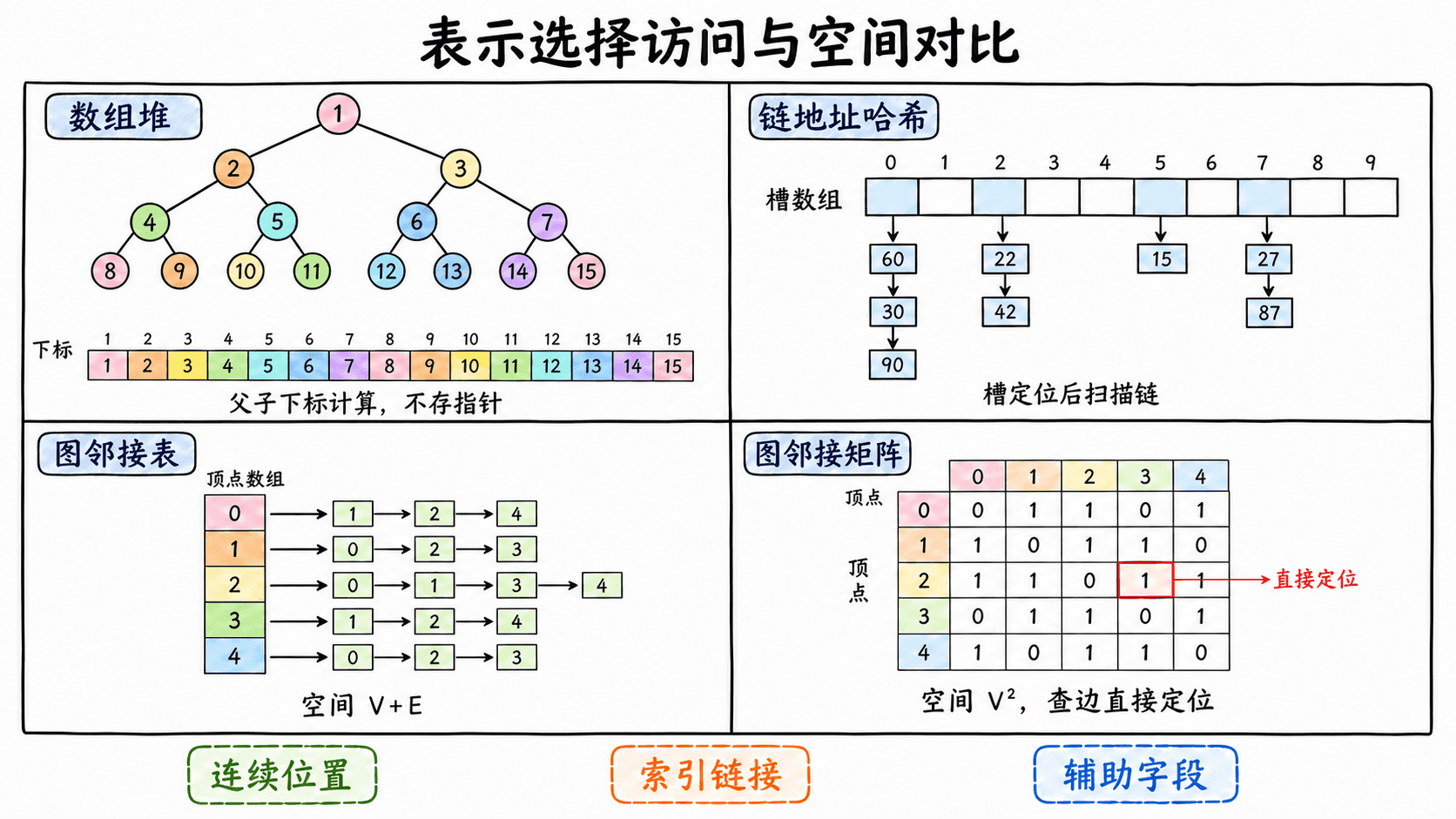
堆:树形关系压进连续数组
二叉堆在逻辑上是一棵近似完全二叉树,在物理上可以直接存进数组。若使用从 1 开始的下标,节点 的关系由公式得到:
父子链接不需要额外指针。数组的 length 表示可用位置数,heap-size 表示当前属于堆的有效元素数,两者不能混为一谈。堆排序在输入数组之外只保留常数个元素,因此属于原地排序;这说明“逻辑上是树”并不必然意味着“每个节点都要单独分配并保存指针”。
哈希:用碰撞风险换取更小的索引范围
直接寻址表为键全集 的每个可能值预留位置,需要 空间。当实际键集合 远小于 时,大多数槽会空着。哈希函数把键映射到 个槽,可把存储量降到与实际键数同阶,但两个键可能落在同一槽。
链地址法让每个槽指向一条链表。它的空间为 ,包含 个槽与 个链表元素;当 时,整体才是与实际键数同阶。查询先访问槽,再沿该槽的链接扫描。在简单均匀散列假设下,装载因子
等于平均链长,成功与失败查询的平均成本都是 。若让 与 同阶, 保持常数,查询平均成本也保持常数。这里的“平均”依赖散列分布假设;最坏情况下,所有键进入同一条链,查询仍是 。
图:邻接表与邻接矩阵服务不同操作
邻接表用一个长度为 的数组保存各顶点的邻居序列。其空间为
其中无向边会在两个顶点的邻接表中各出现一次。检查边 是否存在,需要在 Adj[u] 中寻找 。
邻接矩阵用 个位置保存边是否存在,空间为 ,与实际边数无关。它能通过矩阵位置 直接检查一条边,适合稠密图或频繁的边存在性查询。无权图的矩阵项可以只用一位;无向图矩阵关于主对角线对称,在某些实现中只保存一半。
图的顶点属性也可放在与顶点编号平行的数组中,例如 distance[u] 与 color[u]。这样,结构链接与算法状态分开,辅助空间能明确写成 ,而不是含混地说“每个节点多几个字段”。
小测
5
一个有 |V| 个顶点、|E| 条边的稀疏图,只需遍历每个顶点的邻居。优先考虑哪种表示?
6
下列哪些是从表示本身可以直接推出的结论?
摊还分析把偶发高成本放回完整序列
看到一次操作最坏为 ,不能立刻断定做 次就一定是 。关键要看昂贵操作是否能够连续发生,以及每个对象最多被昂贵地处理多少次。摊还分析研究任意操作序列的总成本,不要求输入服从概率分布。
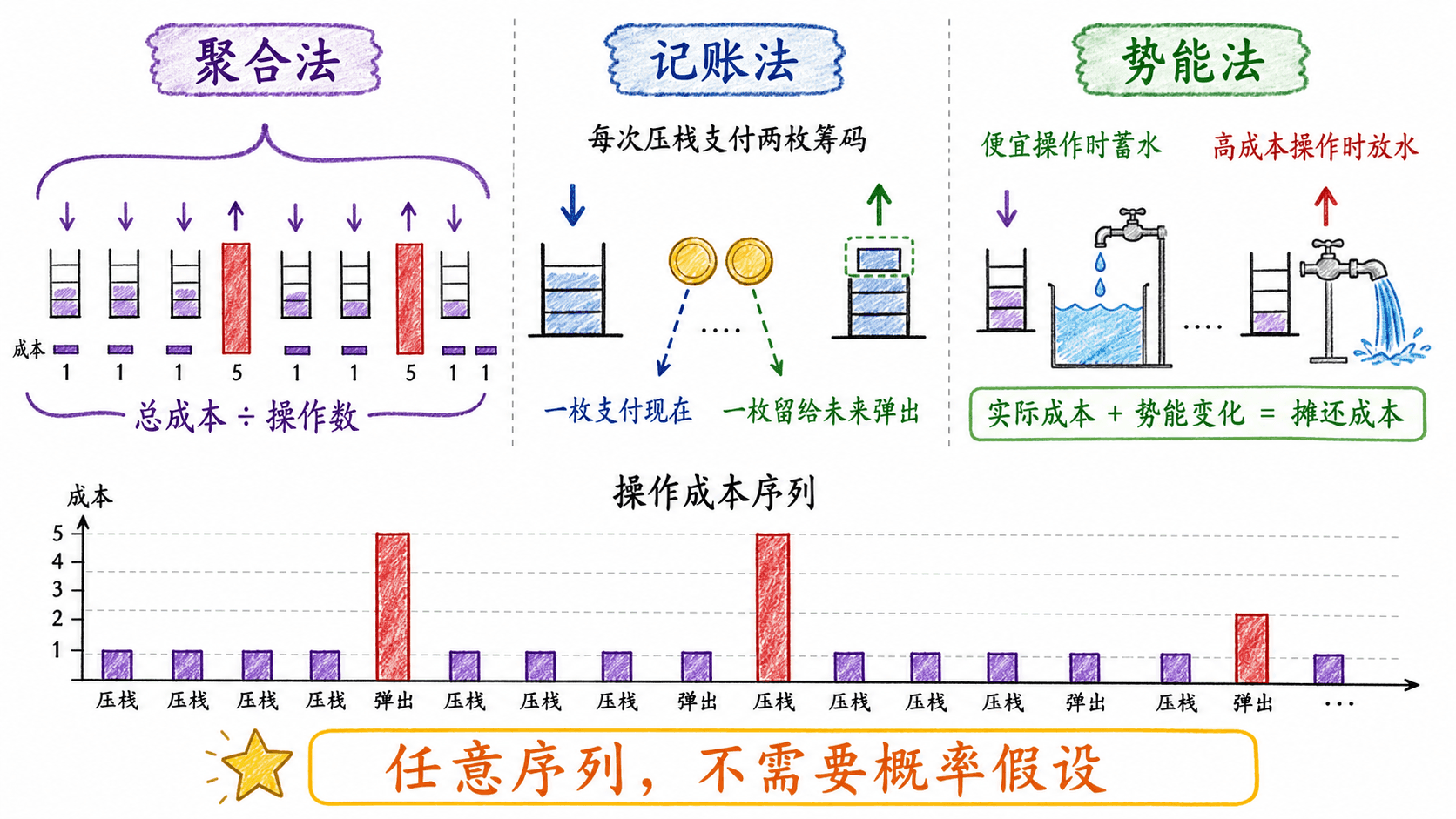
聚合法:先求整段总成本
若任意 次操作的总成本至多为 ,则每次操作的摊还成本为 。
例如,栈增加 MULTIPOP(k):它一次最多弹出 个元素,看起来可能很贵。但从空栈开始的一串操作中,每个元素必须先被压入,并且一次压入对应的元素至多被弹出一次。因此,所有普通弹出与批量弹出的总次数不超过压入次数, 次操作总成本为 ,每次摊还 。
二进制计数器也是同样思路。最低位每次加一都会翻转,下一位每两次翻转,再下一位每四次翻转。 次递增的总翻转数小于
所以一次递增虽然可能连续翻转许多位,摊还成本仍为 。
记账法:便宜时预存信用
记第 次操作的实际成本为 、摊还收费为 。为了让摊还总成本始终覆盖实际总成本,必须对任意前缀满足
多收的部分作为信用留在结构中,信用任何时刻都不能为负。栈可以在每次压入时收取 2 个单位:1 个支付本次压入,1 个留给未来弹出。这样普通弹出和批量弹出可记为 0,因为每个被弹出的元素都带着预付成本。
势能法:让整个状态保存“已预付工作”
对第 次操作后的状态 定义势能 ,摊还成本为
把 次相加,中间势能会消去:
若初始势能为 0,且所有后续势能非负,摊还总成本就是实际总成本的上界。势能增加表示当前操作多付了一些;势能下降表示过去积累的额度正在支付当前高成本。势函数不是代码字段,它只是证明工具。
摊还成本与平均情况不同。平均情况通常需要输入分布或随机假设;摊还分析给的是任意操作序列的总成本上界,即使某几次操作非常昂贵也成立。
小测
7
证明每次操作摊还 O(1),必须假设所有操作序列等概率出现。
8
势能法中,哪项条件能保证摊还总成本覆盖从空结构开始的实际总成本?
动态表扩容为何能做到摊还常数时间
应用常常无法预先知道最终会保存多少对象。连续数组装满时,不能只在尾部“凭空多出一个槽”;需要申请更大的连续数组,把旧元素复制过去,再释放旧数组。触发扩容的那一次插入很贵,但扩容间隔决定了长期成本。
倍增策略把复制次数组成几何级数
设 num 是元素数,size 是容量。空表第一次插入时申请 1 个槽;表满时申请两倍容量,复制旧元素,再插入新元素:
text
TABLE-INSERT(T, x)
若 T.size = 0:
申请 1 个槽
T.size = 1
若 T.num = T.size:
申请容量为 2 × T.size 的新表
把旧表所有元素复制到新表
释放旧表
T.table = 新表
T.size = 2 × T.size
把 x 插入 T.table
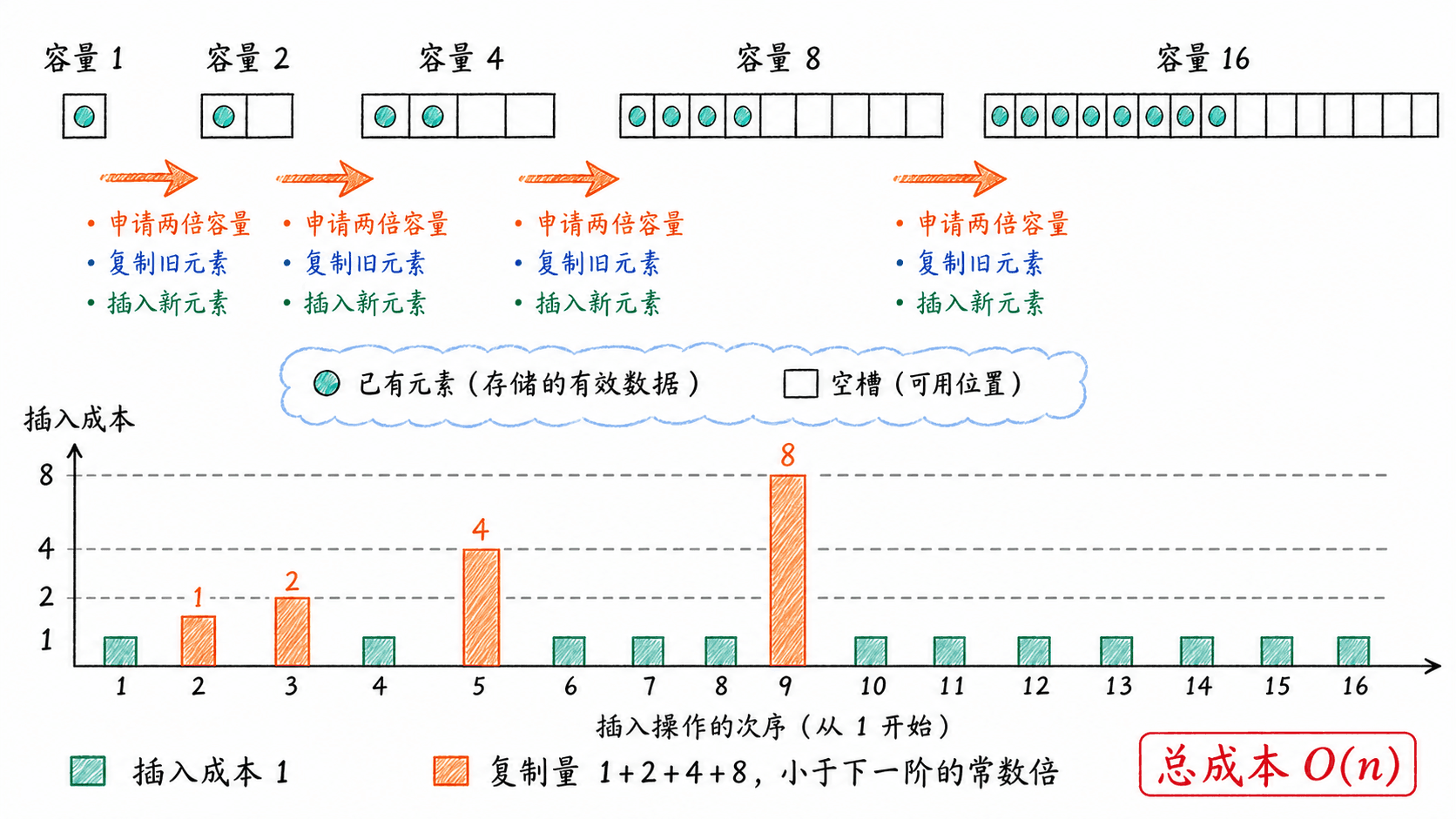
T.num = T.num + 1按一次基础插入或复制一个元素计 1 个单位,第 次插入若不扩容,成本为 1;若插入前已有 个元素且容量正好装满,成本为 。扩容发生在旧元素数为 时,因此 次插入的总成本满足
所以任意 次连续插入总成本为 ,单次摊还成本至多为常数。倍增后装载因子至少约为 ,继续插入时逐渐升到 1,未用空间始终不超过总容量的常数比例。
势能解释“复制预算”从哪里来
只插入的动态表可使用
刚扩容后,元素数约为容量一半,势能接近 0;继续插入时,每次让势能增加 2;表再次装满前,势能已增长到足够支付旧元素复制。没有扩容的插入,实际成本为 1,势能增加 2,所以摊还成本为 3。触发扩容时,复制成本很高,但容量翻倍使势能大幅下降,摊还成本仍为 3。
小测
9
容量按 1、2、4、8……倍增时,n 次只插入操作中的复制总量为什么是 O(n)?
10
只扩容动态表的势函数是 Φ(T)=2·T.num−T.size。若 num=6、size=8,则 Φ(T)=____。
扩容与缩容之间需要迟滞区间
删除大量元素后缩小数组可以回收空闲容量,但缩容阈值不能紧贴扩容后的状态。否则,一小段插入与删除就会让容量来回变化,把整表复制反复触发。
在二分之一处缩容会发生抖动
假设满表容量为 。再插入一个元素时扩到 ,装载因子刚超过 。如果规则是“低于 就缩回一半”,接着做少量删除便会重新缩到 ;再做少量插入又扩到 。每次扩缩都要移动 个元素,而触发它们只需要常数次普通操作,于是可以构造总成本为 的操作序列。
问题不在“缩容”本身,而在两个阈值太近:扩容后没有足够多的后续删除为缩容积累预算,缩容后也没有足够多的插入为下一次扩容积累预算。
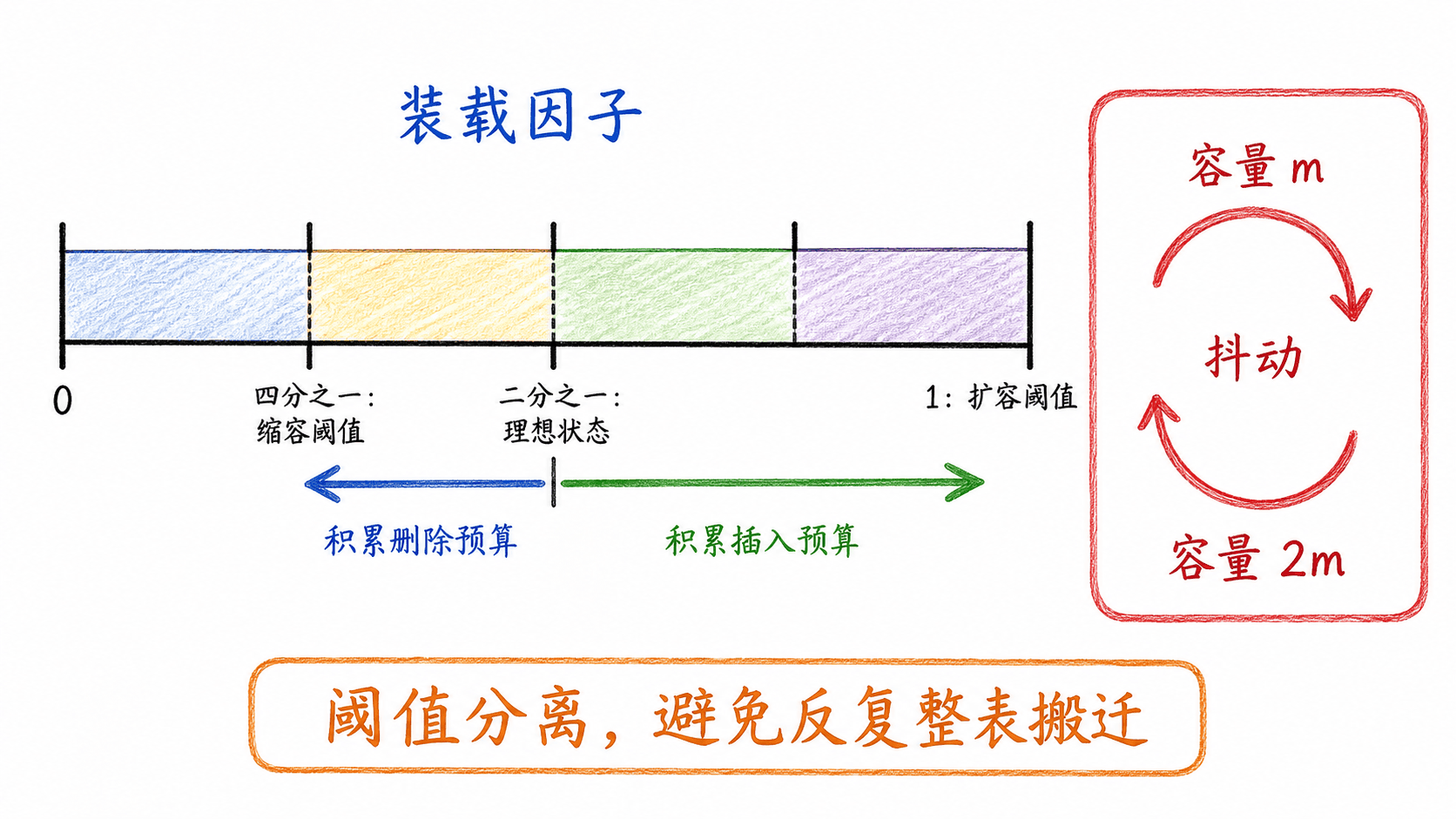
四分之一阈值留出安全距离
一种稳定策略是:插入满表时容量翻倍;删除使装载因子低于 时,容量减半。扩容后装载因子回到约 ,缩容后也回到约 。从 走到 1 需要许多插入,从 走到 需要许多删除,因此两次整表搬迁之间总有足够多的普通操作。
装载因子定义为
空表释放全部存储,并单独约定其装载因子为 1。非空状态下, 有常数下界,所以未使用空间不会超过总空间的常数比例。
分段势函数同时支付两种搬迁
把半满状态视为理想点,势能取 0;越接近满表或四分之一满,势能越高:
当 时,势能等于元素数,能支付扩容复制;当 时,势能也等于元素数,能支付缩容搬迁。该势能从不为负。由此可证明,插入与删除的摊还成本都由常数控制,任意 次操作的实际总成本为 。
缩容策略还要服从数据结构语义
动态表只是存储层,槽里可以组织栈、堆、哈希表或其他结构。复制时必须恢复对应不变式:
- 普通顺序表按逻辑顺序复制元素。
- 堆要保持有效堆区间与数组下标关系。
- 开放寻址哈希表不能简单逐槽照抄,因为容量改变后探查位置会改变,通常需要重新散列。
- 链地址哈希表若槽数改变,也要根据新槽数重新分配各链中的键。
因此,“搬了多少元素”给出扩缩容成本的主项,“怎样搬”还由上层结构决定。
小测
11
满表扩容到两倍后,只要装载因子稍低于二分之一就立刻缩容,可以稳定保证常数摊还成本。
12
采用“满时倍增、低于四分之一时减半”策略后,下列哪些说法正确?
数据跨到外存后要按页面计算
当数据不能同时放进主存,优化目标会发生变化。外部存储按页面读取和写回,不是按单个键逐字节取用。一次页面访问通常带回一整块连续信息,所以运行时间应拆成两个部分:页面读写次数与页面进入主存后的 CPU 计算时间。
页面是外存算法的基本传输单位
外存对象被访问前,先把它所在页面读入主存;若对象被修改,再把页面写回。可以把过程写成:
text
x = 指向外存对象的引用
DISK-READ(x)
读取或修改 x 的字段
若修改过 x:DISK-WRITE(x)若页面已经在主存,重复读取可以视为不产生新的外存访问。由于主存只能同时容纳有限页面,算法不能假设整个结构永久驻留。分析时先数读取或写入了多少页,再讨论页内比较与移动。
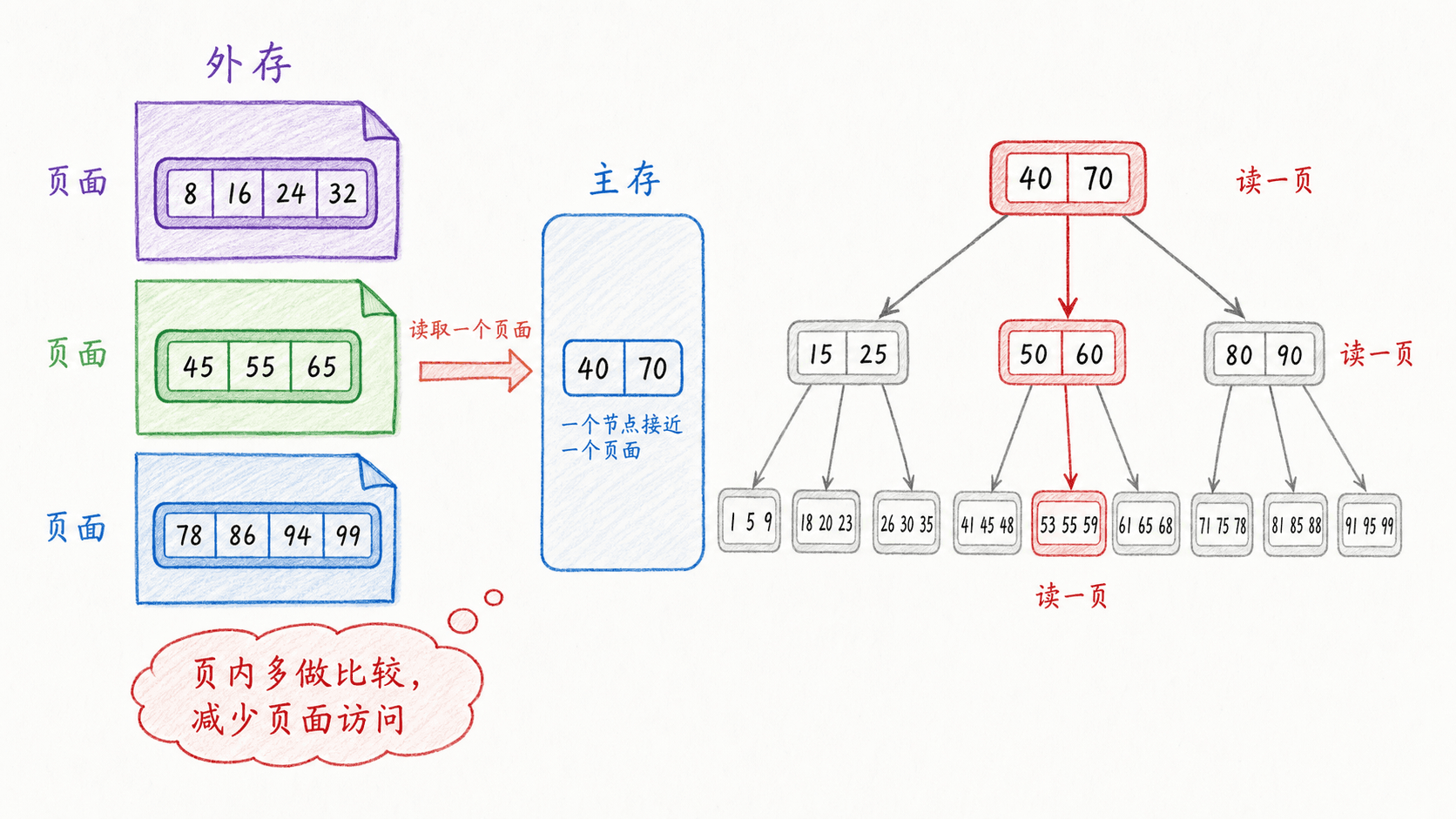
B-tree 用一个页面承载一个多路节点
二叉搜索树每个内部节点至多给出两个方向。B-tree 节点保存多个有序键;含有 个键的内部节点可以有 个孩子,把键空间分成多个区间。节点通常设计得接近一个页面大小,这样一次页面读取会带回许多分隔键与孩子引用。
若最小度数为 ,每个非根节点至少有 个键、至多有 个键,所有叶子位于同一深度。含 个键的树高满足
较大的分支数增大了对数的底,从而减少树高。搜索每下降一层,通常只需再读一个节点页面;根若常驻主存,还能省去根页面的读取。因此,B-tree 的目标不是让页内比较为零,而是用更多页内比较换更少的页面访问。
把局部访问落实为“每页做足工作”
这里的局部性可以直接用页面模型表述:同一节点的有序键、孩子引用放在同一页,一次读取后在页内完成多路判断;若每个节点只放一个键,树会更高,搜索需要读取更多节点页面。
这也解释了前面表示选择的共同原则:
- 多数组或连续对象片段让一组相关字段可以落在紧凑区域,但跟随链接时访问顺序仍由索引决定。
- 数组堆用下标恢复树关系,不需要另读父子指针对象。
- 图邻接表把一个顶点的已有邻居收在一起,矩阵则把所有候选边位置规则排列。
- B-tree 进一步把“相关键放在一起”对齐到页面传输单位,并直接以 I/O 次数评估收益。
一套可执行的优化顺序
实际检查代码时,可以按下面步骤推进:
先写清输入规模。数组用元素数,大整数用位数,图同时保留顶点数与边数;不要先写复杂度再倒推变量含义。
选成本模型。主存算法先数 RAM 基本步骤与独立存储单元;数据跨主存边界时,另外数页面读写,不填固定硬件延迟。
画出表示。标出连续数组、对象字段、索引链接、空闲槽和辅助数组,分别计算结构空间与辅助空间。
检查高成本操作能否连续发生。若扩容、批量弹出或位翻转受前序操作限制,就分析整段序列,并明确势能或信用为何始终非负。
这套顺序的重点很朴素:先把成本单位定义对,再谈优化。否则,减少一次比较却增加一次页面读取,或为了节省空槽而制造频繁整表搬迁,都可能得到方向相反的结果。
小测
13
大规模索引位于外存时,为什么 B-tree 节点通常设计得接近一个页面大小?
14
一个 B-tree 内部节点当前保存 k 个分隔键,它应有 ____ 个孩子区间。